

您现在的位置:首页 > 恶劣天气下,如何保证自动驾驶的可靠性?
恶劣天气下,如何保证自动驾驶的可靠性?
统计数据显示,雨雪等恶劣天气下行车事故的发生率较正常天气高出70%。
风沙、浓雾、雨雪等极端天气,对路况条件、驾驶员视野和场景判断等带来极大干扰。无论是初出茅庐的新手司机,亦或是驾龄丰富的老司机,雨雪天行车均无异于一场噩梦。

而对于“模仿”有人驾驶的自动驾驶汽车,恶劣天气条件对环境感知系统的影响则更为严重。是否具备恶劣天气条件下的正常行驶能力,是检验自动驾驶汽车能否上路的终极“试金石”。
天气对感知系统的影响
为了确保自动驾驶车辆在不同场景下均可以做出正确判断,需要对周围环境信息进行实时动态获取和识别,这些信息包括但不限于自车的状态、交通流信息、道路状况、交通标志等,以满足车辆决策系统的需求。
换言之,环境感知起着类似人类驾驶员“眼睛”、“耳朵”的作用,是实现自动驾驶的前提条件。
目前,环境感知技术有两种技术路线,一种是以摄像机为主导的多传感器融合方案,另一种是以激光雷达为主导,其他传感器为辅助的技术方案,这两种方案常用的传感器种类包括但不限于激光雷达、毫米波雷达、超声波雷达、摄像头等。
不同传感器在面对不同天气时,所受到的影响是不同的,目前暂时没有任何一种传感器可以完美应对任何天气。
激光雷达
激光雷达+高精地图,是目前自动驾驶一种主流传感器组合方案。
激光雷达精度高、穿透力强,可以实时扫描周围环境建立三维模型,拥有很高的可靠性和精确性,但对恶劣天气的适应性则稍微差一些。
雨天对激光雷达的影响相对较小,除暴雨等极端降雨条件下,激光雷达基本不会受到任何影响。
雪天和风沙天则会对激光雷达造成明显影响。与降雨不同,雪由固体物和雪花组成,很容易堆积形成障碍物(风沙天也容易形成堆积物),从而影响激光雷达的扫描距离,或者导致激光雷达的错误探测。
毫米波雷达
毫米波雷达探测距离远,精度虽没有激光雷达高,但在众多传感器类别中仍处于较高水准,主要作为测距和测速传感器而存在。
毫米波雷达对雾、烟、灰尘的穿透能力极强,在恶劣天气条件下,整体表现更好。但毫米波雷达也并非全无缺点,其在有雨有雾或大雨的天气下表现欠佳,性能会出现大幅下降,且毫米波雷达也存在对行人识别不足的问题。
超声波雷达
超声波雷达具有频率高、波长短、绕射现象小、方向性好、能够成为射线而定向传播等优点,但探测距离很短,因此常用于短距离测量,如泊车场景。
超声波雷达受天气情况影响大,不同温度情况下,测量的距离也不尽相同,在测量较远距离目标时,其回波信号会比较弱,无法精确描述障碍物的位置。
摄像头
摄像头是受天气影响最为严重的一种传感器。一滴雨、一粒沙子、一片雪花都会对摄像头造成遮挡,无法正确感知周围环境。
此外,摄像头也是少有的在正常天气下,也会出现被干扰的传感器。晴天阳光的照射、玻璃的反射都会使摄像头的可见度降低到几乎为零,光引起的表面反射也会出现混淆视野,从而造成误判的情况。
如何保证恶劣天气下的可靠性
自动驾驶一项重要潜在应用优势就是提高行车安全性。
理想状态下,通过应用车联网等技术,自动驾驶汽车可以有效感知路况信息,自动控制与周围车辆间距,交通事故发生率会维持在一个非常低的水准。
为了达到理想状态下的自动驾驶,当前仍需解决各种技术问题,自然也包括恶劣天气下的行车安全性。
目前,提升恶劣天气下自动驾驶汽车行车安全性的方式主要有多传感器融合、恶劣天气训练数据集、模拟仿真等多种方式。
多传感器融合
单一传感器在面对恶劣天气时会出现各种各样的问题,但通过多传感器融合的方式,可以做到优势互补,扬长避短。
此外,多传感器融合也可以在某些状态下,如某一种传感器出现故障的环境下,额外提供一定安全冗余度。这种错误或故障可能是由天气原因或是人为原因(例如,对摄像头或雷达的电子干扰或人为干扰)导致。
训练数据集
感知算法的训练与调优离不开各种数据集。
为了让自动驾驶汽车能在各种环境下均能准确识别路况信息,并做出正确判断,就需要为算法投喂种类多样的路况数据。
目前,用于感知算法训练的数据集多以良好天气场景为主,如晴天或阴天。恶劣天气场景下的数据集不仅总量少,场景覆盖度也同样不足。出现这种状况的原因一方面是因为恶劣天气出现的概率相对较小,实现自动驾驶是一个循序渐进的过程,优先解决大场景,后续逐渐解决小场景是一种现实且行之有效的方案。
另一方面原因则是恶劣天气数据的采集离不开有人驾驶采集车。恶劣天气下,有人采集车上路行驶同样会面临较高的行车安全风险,采集存在一定难度。
事实上,除了采集存在难度以外,恶劣天气数据集的标注处理同样也是一个难题。不同于良好天气下采集的数据,恶劣天气下采集得到的数据集往往存在图像模糊、无法准确分辨物体等问题,处理效率和数据质量均较难以满足实际需求。
曼孚科技深谙恶劣天气数据集的标注处理之道。无论是雨天、雪天还是风沙天等,曼孚科技均积累了较为丰厚的经验,MindFlow SEED数据服务平台也针对恶劣天气场景做出优化,AI预识别算法加持下,模糊图像的识别处理准确率得到有效提升。
无论是数据处理效率亦或是数据产出质量,均可以满足大规模恶劣天气感知算法的训练需求。
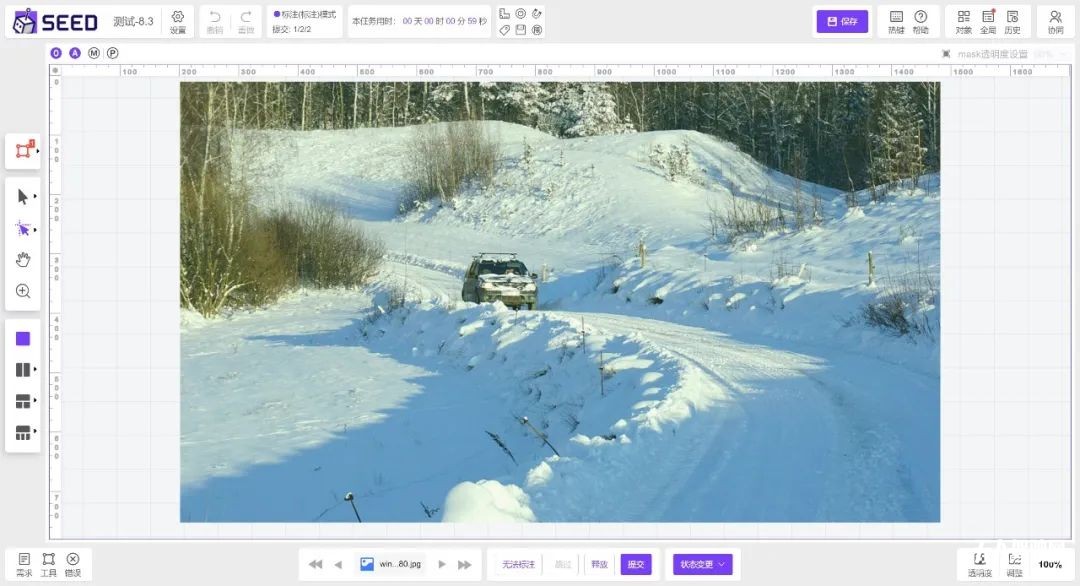
数据来源:MindFlow SEED数据服务平台
仿真与模拟
风沙、雨雪等恶劣天气受季节、地域等因素影响较大,热带地区无法采集到降雪环境相关数据集,水草丰茂地区也很难出现风沙天气。
然而哪怕是在合适的区域,恶劣天气的出现也是一件小概率事件。为了采集得到足够多的数据集,需要付出的时间成本与人力成本均十分高昂。
另外,正如上文所述,恶劣天气对采集车的行车安全也是一项考验,有人驾驶的数据采集车在恶劣天气下并不能做到百分百安全。
仿真与模拟平台的出现则很好地解决了此类问题。实验室可以代替实际环境做测试。通过在封闭环境下模拟雨雪、雾霾、风沙等天气,既与真实环境相差无几,又高度可控,对人员或设施的安全危害可以降低到一个很低的水平。
除以上三种方式以外,V2X、路面检测、先验地图等也是解决恶劣天气自动驾驶安全行驶的有效方式。伴随着众多解决方案的应用,自动驾驶汽车在恶劣天气下的表现愈发稳健,全场景、完全自动驾驶未来可期。