


2019年5月30日,中国首部自动驾驶仿真蓝皮书《中国自动驾驶仿真技术研究报告(2019)》在第六届国际智能网联汽车技术年会(CICV)上重磅发布。
此部自动驾驶仿真蓝皮书是由51VR发起,由清华大学苏州汽车研究院、广汽研究院智能网联技术研发中心、中国汽车技术研究中心智能汽车研究室暨汽车软件测评中心、江苏省智能网联汽车创新中心、北京智能车联产业创新中心、奇点汽车和当家移动绿色互联网技术集团有限公司(51VR)联合发布。

左一:张帆博士;左二:戴一凡博士;左三:孔凡忠博士;右一:王羽;右二:郭继舜博士;右三:李熠
《中国自动驾驶仿真测试技术研究报告(2019)》是目前为止第一部全面介绍中国自动驾驶仿真测试发展现状的工具书,既结合了当前学术机构的前沿研究成果,又结合了领先企业的最新工程实践,内容涵盖自动驾驶仿真测试所有领域,包括:仿真测试市场需求分析、方法应用、搭建技术方案、软件现状、虚拟场景数据库、示范区测试方法介绍、标准介绍、挑战及发展趋势八个部分,由自动驾驶仿真领域多位行业专家意见汇编而成。
其中,清华大学苏州汽车研究院院长成波教授特别担任此次蓝皮书编委会主席,对蓝皮书的总体方向与核心要点进行把关。
参与此次蓝皮书撰写的编委会委员包括北汽研究院副院长兼新技术研究院院长孔凡忠博士,广州汽车集团股份有限公司研究院智能驾驶技术部部长郭继舜博士,中国汽车技术研究中心(CATARC)智能汽车研究室暨汽车软件测评中心主任王羽先生,江苏省智能网联汽车创新中心总经理戴一凡博士,奇点汽车美国公司总裁、美国研究院院长黄浴博士,51VR智能驾驶与交通事业部产品与商务部长张帆博士。强大的专家阵容,是蓝皮书在业内的权威性发声以及专业性地位的有力保证。
对于此次蓝皮书的意义,成波教授表示:“国内自动驾驶仿真行业尚处于起步阶段,但正在打破国外仿真软件长期垄断的状况,此次蓝皮书的发布正是对中国原创仿真软件崛起的一个阶段性总结。”
成波教授的点评正好印证了当下的中国。如今,中国正在迎来的一个自主原创科技迅速崛起的新时代。
中国原创科技力量的崛起
仿真软件在我国装备工业软件中一直是弱项。自动驾驶仿真软件也是如此。国外自动驾驶仿真软件起步早,且跟硬件早有绑定,发展趋势迅猛。
由于国外自动驾驶仿真产品一直占据市场主导地位,因此,标准也是由这些国外软件在主导。而这样导致数据格式各异,让国内的数据标准受到严重限制。
为此,中国必须深度参与到全球自动驾驶仿真技术与标准制定的竞争之中,才能改变这一现状。而要参与进国际标准制定,中国首先需要拥有自主原创的仿真软件。
以51VR为代表的自动驾驶仿真软件,其拥有自主知识产权的技术和中国特色道路数据,如今正在努力改变汽车工业领域被国外软件所垄断的局面。
中国的自动驾驶仿真软件虽然起步稍晚,但独具优势,无论是从场景衍生、法律法规、交通环境、还是从使用习惯、本地服务、快速响应上,都有着国外自动驾驶仿真软件不可比拟的先天条件。
“中国未来在自动驾驶仿真软件上,一定能赶超国外的仿真软件,对此我非常有信心。在中国做自动驾驶仿真软件,这件事确实有难度,但无论是对于市场,还是对于整个行业创新,都是非常有意义的。”江苏省智能网联汽车创新中心总经理戴一凡博士说到。
如今,中国已开始越来越深度地参与到了全球技术与标准制定的竞争之中。
2018年5月国际标准化组织组建自动驾驶测试场景工作组,中国首次作为国际标准工作组召集人,在智能汽车的国际标准化领域做出中国贡献。
在这个国内外自动驾驶纷纷制定标准建立标准的窗口期,抢占技术规范的制高点至关重要。未来,谁能更深入地参与到仿真测试方法与数据格式标准化工作,谁就能在标准形成的后期获得更大话语权。
随着中美贸易战摩擦不断升级,科技冷战一触即发,自主原创科技呼声愈渐走高。
作为一种通用的底层技术,计算机仿真技术已是中国智能制造完整技术链条中的根基之一。每一次产品研发过程的技术经验迭代,工程师实践积累,产品开发流程优化,都是对中国计算机仿真软件及数据信息体系的不断完善。发展自动驾驶自主仿真软件平台,也是在培养人才和建立备用系统。
一旦某天,当国外的巨头对中国工业软件实施断供,那么这套自主研发系统就可以立即投入使用,保证我国汽车自动驾驶技术与智慧交通出行的持续发展。拥有科技自主权的无人驾驶仿真软件,正在打破汽车工业领域中国软件为零的记录。
无人驾驶仿真为何越来越重要?
2018年3月,Uber一辆自动驾驶汽车发生了与行人的碰撞事故,直接导致其路测许可被暂停。
特斯拉因Autopilot辅助驾驶系统而导致的驾驶员死亡事故更不止一起。2016年1月一辆特斯拉在京港澳高速行驶时,与前方的道路清扫车发生追尾事故,导致驾驶员身亡,特斯拉公司承认车辆在案发时处于自动驾驶状态;同年6月,美国佛罗里达州也发生了特斯拉与横穿马路的重型卡车相撞的事故,导致驾驶人当场身亡。
自动驾驶事故促使各国车辆技术监管机构提高了警惕,开始慎重审视在公共道路上进行的自动驾驶道路测试。
为解决实际道路测试问题,国家与各地区积极投入资金建设一批封闭测试场地,并有条件的开放了若干指定道路。但相比于旺盛的测试需求,国内自动驾驶测试场地数量远远无法满足要求。
按照美国高速公路管理局的统计数据,驾驶者平均需要行驶85万公里才会经历一次警方报告事故,接近1.5亿公里才会经历一次致命事故。因此,每个自动驾驶系统需要 160 亿公里的驾驶数据来进行系统优化。照这样计算,需要配置一支1000 辆自动驾驶测试车的车队,花费大约 50 年的时间,才能完成足够的里程测试。正是因为时间和花销的不可承受,行业普遍认识到,基于计算机的仿真技术是对自动驾驶系统进行虚拟测试与评价最有力工具。
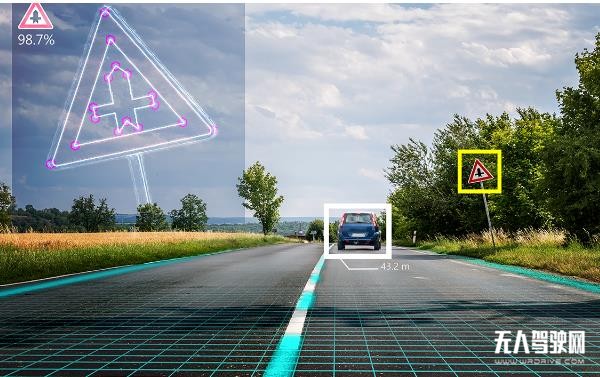
图为自动驾驶仿真静态场景编辑与训练
自动驾驶仿真系统通过提供更加丰富多样的静态环境,连续动态的随机交通流,结合边缘案例与危险案例的参数泛化技术,可以在有限的虚拟测试里程内有效增加高训练价值场景出现的频度与密度。
2017年发布的《中国智能网联汽车技术路线图》指出:测试评价是智能网联汽车基础支撑技术之一。其中自动驾驶系统计算机仿真是自动驾驶车辆测试和试验的基础关键技术,也是未来行业定义自动驾驶车辆相关开发流程与技术准入标准的基础工具。
自动驾驶仿真测试,是指通过计算机仿真技术,建立现实静态环境与动态交通场景的数学模型,让自动驾驶汽车与算法在虚拟交通场景中进行驾驶测试。
传统的计算机仿真软件在解决以下几方面的问题上都存在不足,例如高精度地图制作与匹配,高逼真静态场景的建立,先进感知传感器的物理仿真,驾驶员模型与智能交通体模型仿真,动态场景库建设等。
如今,新一代具有信息物理特征的仿真系统,不但可以更高效的迭代和验证自动驾驶算法,而且可以更好地满足对物理信息系统的整体测试需求。
目前,市场上既出现了如百度、腾讯与Waymo等都在使用企业自研的内部仿真系统,也出现了服务于汽车行业的外部商业软件,例如51VR、AAI、CARLA、Cognata、Panosim等。仿真测试已经成为大多数企业研发自动驾驶系统的刚性需求。
未来,“自动驾驶软件开发”和“自动驾驶系统及整车验证与集成”,很大程度都将依托于计算机仿真技术提供的共性支撑。
对于汽车制造与技术企业而言,自动驾驶仿真系统贯穿产品的研发与使用生命全周期:从产品概念选型到产品运行数据收集与系统升级,仿真系统既作为工程技术开发人员的工具箱,帮助实现产品的安全性与稳定性,又作为企业管理人员的数据知识库,帮助累积企业的设计流程、工程经验与数字模型等宝贵的无形资产。
对于国家监管与测试机构而言,自动驾驶系统仿真还可作为分析与检测工具,可对汽车功能安全性与智能水平高低进行评价。
据推算,未来5年仿真软件与测试的国际市场总规模约在百亿美元左右。随着商业化的落地,行业将对仿真虚拟测试产生更多需求。可以预计,适用于自动驾驶系统的仿真技术也将会同机械电子系统仿真一样被大规模地应用于汽车产品的研发流程当中。
为了让所与人能更全面地了解无人驾驶仿真测试技术,蓝皮书从应用的视角,一共囊括了从方法、到数据库、到标准等章节。无论是对于无人驾驶开发企业,还是测试机构,尤其是行业新人,透过这本蓝皮书,能快速了解到自动驾驶仿真测试在应用上最新实践,作为工作中最及时最详细的技术参考。























