


高精度地图是实现 L3 级别以上辅助/自动驾驶的重要一环。高精度地图是指高精度、精细化定义的地图,可以描述为对3D道路环境的重建。高精度地图含有大量道路矢量元素信息以及车道周边的固定对象信息,形成对路网精确的三维表征,比如路面的几何结构、道路标示线的位置、周边道路环境的点云模型等。高精度地图在L3级别以上的辅助/自动驾驶承担着重要任务:
1)定位,将车载 GPS、IMU、LiDAR 或摄像头的数据和高精度地图数据进行匹配,从而确定车辆的位置;
2)了解路况,导航系统可以准确定位地形、物体和道路轮廓,从而引导车辆行驶;尤其在传感器受环境影响失灵的情况下,高精度地图仍可全天候工作,可以提供自动驾驶所需信息;
3)看的更远,帮助自动驾驶车辆对超出视野范围的路况进行处理。
高精度地图和传统地图的差异主要来源于使用者的不同。传统地图是供人使用的地图,而高精度地图是给计算机使用的地图。因此传统地图只需要包含道路、兴趣点等基本信息,精度大部分在米级,高精地图则要求更详细的道路和车道模型等来作为判断的依据,精度需要达到厘米级。由于人可以对突发事件和信息进行加工和处理,传统地图的服务性要求较低,更新频率也较低;与此相对的,计算机无法对不存在于先验模型的情况进行处理,因此要求较高的服务性和更新频率。传统地图主要用于导航、搜索和目视,高精度地图主要用于环境感知、定位、路径规划和车辆控制传统地图属于信息娱乐系统,高精地图则属于车载安全系统。
高精度地图目前尚未有正式标准,业内现有六大事实基准。不同级别的自动驾驶对于高精度地图的精度、数据内容等的要求不同,但针对具体的应用,究竟需要什么样的高精度地图,业内还没有可供参考的正式标准。不同的图商之间也存在差异化。较为公认的事实标准包括相对精度、逻辑一致性、数据正确性、点云属性、存储方式以及元素完备性六个方面:
相对精度:不同于测绘中的基于绝对坐标建立的绝对精度,自动驾驶并不要求知道某个位置的经纬度,更多的是要求知道相对位置,因此衡量标准为相对精度。业内较统一的相对精度指标是在信号完全好的情况下,能够达到平面 10 厘米,高程 20 厘米的精度。但同样的,并无一致的官方标准,具体精度指标通常由各个厂商根据自动驾驶的需求反推。
逻辑一致性:逻辑一致性要求同一个地点在地图上对应的点是唯一的,不会产生重影。
数据正确性:数据正确性考虑的是要求高精地图能够去除短期静态物体,保证路面是干净的。
点云属性:高精度地图要求点云属性不能过于简单,以便进一步读取文字内容信息等来保证地图的准确性。
存储方式:存储方式方面,鉴于自动驾驶的运用范围是有限的车载空间,因此高精地图的压缩比例越高越先进,车能够跑的更远,有更好的主动规划能力。
元素完备性:元素完备性要求高精地图具有足够多满足自动驾驶需要的矢量元素信息,如下图所示:
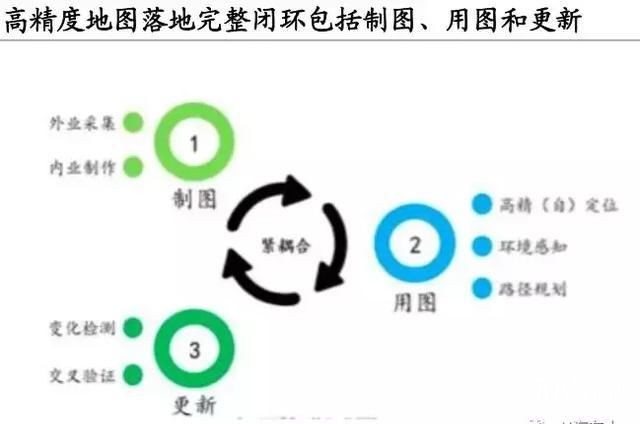
2,高精度地图落地包含制图、用图和更新三个环节
高精地图落地的完整闭环包括制图、用图和更新三个紧耦合的过程,以保证数据的高频流动和更新。制图包括外业采集和内业制作,用图包括高精定位、环境感知和路径规划,更新包括变化检测和交叉验证。其中较为关键的环节是高精地图的采集和更新。
专业型及工业型采集车多用于高精度地图测绘制图,众包型采集车用于地图更新。当前主要有三种移动测量技术用于测绘采集,分别是专业型采集车、工业型采集车和众包型采集车。专业型采集车的成本相对较高,进口单车成本能达到几百万,精度可达厘米级。工业型采集车单车成本约为 70 万,精度在 20-50cm 左右。众包型采集车精度及成本则均低于专业型及工业型采集车。图商在生产高精度地图的过程中一般采用精度较高的采集车来完成地图的初始绘制,在后续的地图更新过程中转用精度较低的众包型采集车来降低成本。
随着对地图精度要求的上升,将导致地图生产成本大幅上涨。不同图商在实际的采集过程中,会从精度和成本两方面进行权衡,对上述三种移动测量技术进行一定的改装以适用于自身的需求。地图生产成本随着地图精度要求呈指数型上升,主要原因包括两方面:设备成本和人工成本的上升。设备成本方面,以惯性导航为例,0.3 度的惯性导航成本约为 3度惯性导航的 50 倍。人工成本方面,精度需求的提升将大幅降低高精地图作业效率,从而导致人工成本上升。
低成本众包实现高精度地图更新。由于高精地图对数据更新的频率要求很高,从成本角度考虑使用较专业的采集车负担过重,而且相对来说需要更新的信息远小于初次测绘时所需获取的信息数量,所以在更新过程中大多使用成本和精度较低的众包车辆。同时在理论上由于众包车辆数量众多,在大样本的前提下可以一定程度的弥补精度的不足,使更新的数据基本达到和建图时接近的精度。数据采集车辆在道路运行的时候通过高精定位采集增量数据,上传到基于云的数据中心,通过机器学习和大数据处理辅以人工检测最终完成实时路况的更新。























