


Part 1
自动驾驶的HMI设计发生根本性变化
1. 交互设计的主体发生变化
人与智能系统的交互不仅要考虑到在座舱内的用户,还将重点考虑他们在进入及离开该移动空间的体验、如何与周围车和行人进行互动等,那么交互设计的主体将从传统的主要用户如驾驶员和乘坐人员拓展转变为车内的用户、社会化道路上周围的行人以及周围车辆中的人,这也就增加了更多的交互设计类型,例如车与车内用户的交互、车与车外的行人的交互以及车与周围车辆的用户的交互。

2. 交互设计信息需求的变化
(1)信息需求从驾驶任务(DDT)过渡到非驾驶相关任务(NDRTs)
国际汽车工程师协会(SAE)对驾驶自动化系统发展的阐述中表明将人逐渐从动态驾驶任务(DDT)中释放出来时自动驾驶系统(ADS)从非自动化驾驶(0级)发展到完全自动化驾驶(5级)的根本目标,同时心理学中的注意力分配理论表示人的注意力被视作一种在若干并发外界输入中可被分配的心智资源,例如边开车边听音乐等。那么,在自动驾驶功能完善的环境下,我们可以看到用户注意力从高负荷的驾驶相关任务逐渐释放到非驾驶任务上,这将使得数字化技术能够深入到更多的非驾驶任务上,支持用户在驾驶及非驾驶活动相关的信息娱乐需求。

(2)交互界面组织逻辑将从以驾驶为中心的性能导向转变为旅程相关的服务导向
在未来的行驶空间内,人参与驾驶相关的任务随着自动驾驶级别高度化减少,驾驶功能本身最终会成为自动化系统控制下的出行服务的一部分,这将导致对未来车内用户体验的考量从安全和效率方面为主转向偏重娱乐与社交等方面。 因此交互界面的组织逻辑将从以驾驶为中心的性能导向转变为旅程相关的服务导向。
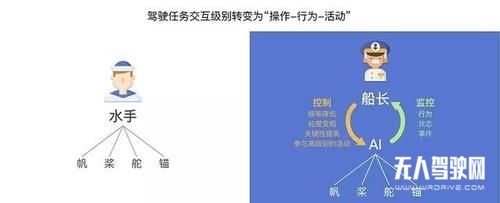
(3)驾驶任务交互级别转变为“操作-行为-活动”
全智能车辆需要能够观察、理解、模拟、推断和预测车厢内的乘客、社会化道路上周围的行人以及周围车辆中的人的行为。那么随着自动化程度的提高,与驾驶有关的控制频率降低、粒度变粗但关键性反而提高,最终用户将更多参与高级别的活动。
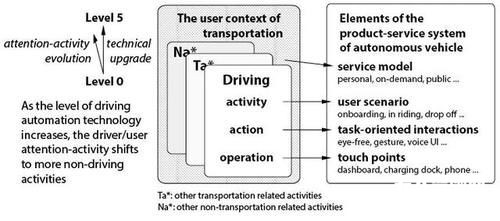
从活动理论角度来看,智能系统的设计理念在于使用户将更多的注意力放在满足他们的需求和更高层次的活动组织上,而不是更底层的具体操作实施上。一次出行活动由一系列出行行为组成,每个行为又由若干具体驾驶操作实施。
3. 注意力的释放和回收与接触点设计
基于旅程的用户体验质量将由人们如何分配他们的注意力给到不同行驶场景中的多个任务来决定。其中用户注意力分为中心注意力和外围注意力,两者之间的动态分布变化对应着注意力分配给潜在活动的变化。因此在自动驾驶过程中,人与自动化系统之间演变可以描述为“用户注意力-活动”的螺旋循环迭代演进过程,即传统驾驶领域中,中心注意力分配给主要驾驶任务相关的活动,外围注意力分配给非驾驶相关的活动;随着自动化水平升级过程中,中心注意力将逐步过渡到分配给非驾驶相关的活动,丰富用户的相关旅程的服务体验,外围注意力将转变到紧急情况下必要的干预式的驾驶相关的活动等。那么基于“用户注意力-活动”的动态变化,未来汽车驾驶空间的交互设计带来了新的挑战。
(1)注意力释放到非驾驶活动将改变设计的交互通道
当用户的注意力流动在多个非驾驶活动任务中时,与驾驶任务相关的界面将需要优化以匹配在外围注意力分配下用户隐式交互的特点。那么自动驾驶的交互通道将变得多样性,听觉、触觉等交互通道的使用几率显著提高。例如随着自动驾驶的级别增加,无人驾驶的交互可提供沉浸式体验,譬如VR和触摸屏。
(2)注意力回收到自动驾驶系统的驾驶循环中
与此同时,如何设计车辆控制接管请求使其将人们的注意力迅速回收到自动驾驶循环中变得非常关键。从控制理论的角度,Pohl和Murray-Smith描述了“不经意式交互”(Casual interation)与传统的“专注式交互”(focus interaction)的区别,建议通过增加灵活的输入感知距离、多模态的输入反馈等手段降低。
(3)基于用户旅程的接触点交互设计
基于用户旅程的交互范式将从目前以方向盘和仪表板等传统驾驶任务控制为中心的人机界面交互过渡到兼顾非驾驶活动的混合布局,最终演变为以非驾驶活动为主导的跨媒介、多设备、广泛接触点之间的交互。
Part 2
L4自动驾驶车辆的3DHMI设计实践
按照SAE自动驾驶级别的分类,驾驶员与驾驶系统之间注意力的释放从量变到质变关键点是在L2自动驾驶到L3的过程中,因此L4自动驾驶系统中的用户注意力将大部分地放到非驾驶任务上,其驾驶任务交互已经发生根本性变化,接下来通过驭势探究的L4自动驾驶系统中的3DHMI设计来讨论理解和实践这一系列变化。
我们知道自动驾驶任务交互级别转变为“操作-行为-活动”。可以打个比方,有了自动驾驶,用户的角色就从水手升级成了船长。他们不用再去参与帆、桨、舵、锚的具体控制,而是告诉AI“去哪里?”,同时去监控AI的行为、状态、事件。
我们在长期测试中发现,当乘客初次与自动驾驶车辆(Autonomous Vehicle, AV)接触时,好奇与疑惑总是充满整个体验过程。一方面他们尝试着去理解“机器如何看世界的?”;另一方面,他们却疑惑着“为什么会停下来?”、“我接下来该怎么做?”。所以在体验的过程中,我们期望有车内的一个设备可以承担起于乘客交流的角色,帮助他们去理解AV的感知、规划、决策的内容,更进一步能够相信AV有能力去处理当前遇到的交通状况。当你需要解释的时候,你总可以从它那里找到答案;当你不需要解释的时候,它不会打扰到你。
1. 三维的世界,抽象的语言
想要让乘客理解AV的想法,首先要让他们站在AV的视角去看世界。雷达,摄像头,毫米波等传感器是AV的眼睛,来自它们数据可以通过神经网络算法被AV理解成一个个现实中有含义的对象。而且机器也有着对这些对象的边界,属性,运动,预测轨迹等信息进行更丰富的理解。它们的世界是三维的,如果用我们熟悉的二维界面的设计思路为乘客去还原AV正在处理的交通场景,那么乘客需要花费更多的精力去建立二维与三维世界的联系。所以我们选用更直观的三维方式将AV的世界呈现在用户的眼前。
另外,帮助乘客快速建立AV世界与现实世界联系的方法就是把信息抽象成他们可以理解的最简单的符号,比如面对造型千秋的车辆,简化成一种符号可以帮助他们轻松建立起与现实世界中的关系,而不是让他们去关心那些障碍车的造型这种无关紧要的信息。所以在风格上我们的设计会尽量减少模型的细节,让这些模型可以在光影下可以被乘客直观地理解他们的含义。

2. 按照认知的过程,描绘AV世界
我们在16年开发过一套面向工程师使用的HMI Display, 工程师们可以通过这个可视化工具,了解自动驾驶车辆的当前状态、行程、调试信息。但是对于我们的客户来说,这套系统上的信息是复杂,不直观,甚至难以理解的。

如何把AV那些复杂且工程的信息简化成乘客容易理解且关心的信息呢?我们的方式是将信息按照用户认知的过程分级,逐级将AV世界的信息呈现给用户。
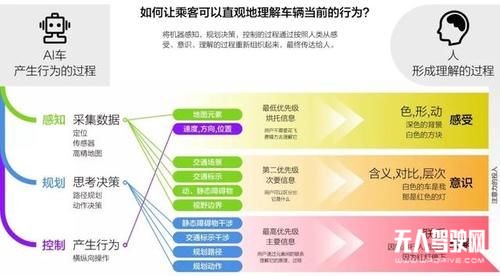
人类是按照感受,意识,理解这样的过程建立对事物的认识的。而AI产生行为的过程也有相似的运行逻辑,它们需要先从传感器和高精地图拿到原始数据,通过算法提取现实世界中的各种对象;然后通过决策和规划过程,去思考当前场景下的下一步的处理方式;最后通过车辆的横纵向控制完成预期的动作和规划。这个过程中,用户可以通过对色彩,形状,运动等信息,很本能地去感受地图中的元素,车速,方向等信息;再进一步,用户形成了意识,他们通过画面中的对比、层次区分出了场景中的障碍物、交通标识、视野边界等含义。最后,通过建立元素之间的联系,用户通过建立元素间的联系去理解它们的原理及过程,比如车因为躲避行人而停下。这也是我们为什么淡化交通场景,打平所有感知内容,而去突出AV本身及其规划路径和干涉内容的原因。
3. 细节
(1)看透AV的想法
换句话解释就是“什么原因让车做了什么?”作为整个界面的核心内容,一方面我们想尽可能用最简单的元素去表达AV的想做什么,另一方面我们还需要建立AV与环境的联系来解释这其中的原因。规划路径的长短、颜色、流动方向分别代表实时规划的边界、加减速的状态、和运动的方向。干涉内容也会被高亮起来去解释其中的原因。
(2)视角的切换,场景的转变
视角决定了乘客和AV对话的关系。不同场景下,乘客和AV交流的内容也会有所不同。行程开始前,天空俯视视角可以帮助乘客更好的明确整个旅程的路线;行程中,乘客可以通过第三视角来获得自己想要的解释;行程结束后,较低的俯视视角可以帮助乘客对应下车后的周边环境。
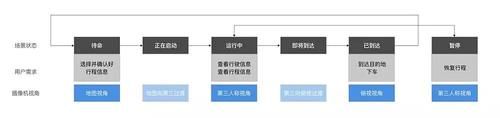
同时我们也减少一些不必要的视角运动,来避免用户去理解不必要的内容。比方说换道的过程中,由于只是车向的轻微调整,我们会保证视角固定向前,而不是随车摆来摆去。
(3)像电子游戏一样
在整个设计的旅程中,我们发现可以从电子游戏中找到很多灵感。比方说,AV监测到前方的交通标识,它会把标识当作一种状态buff,“吃掉”or“捡起来”。乘客可以很直观的理解,AV注意到了并会遵守这个标识。
Part 3
自动驾驶HMI设计机会探讨
未来将以基于旅程相关的产品服务系统设计复杂的可持续性的汽车行业设计生态,我们采用产品服务系统(PSS)设计思路,推演出一种基于用户注意力-活动维度伴随自动驾驶技术升级而产生的变迁及其对应的设计考量因素。
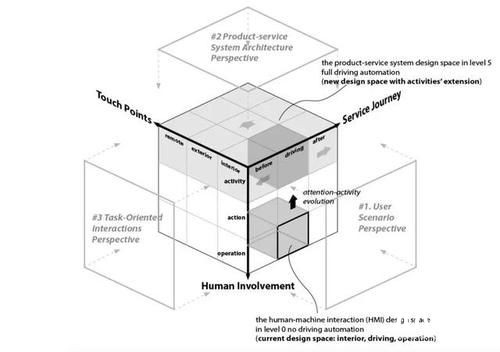
在产品逻辑上,我们必须考虑自动驾驶产品服务系统的三个基本维度,包括基于上文所述的驾驶员/用户注意力-活动变化下系统中的人的参与程度、体现具体业务流程的服务旅程以及接触点,包括如何使用核心产品(车辆)和其他相关产品和系统。通过整合这三个维度(人的参与、服务旅程和接触点)去思考将为我们揭示一些新的设计机会。























