


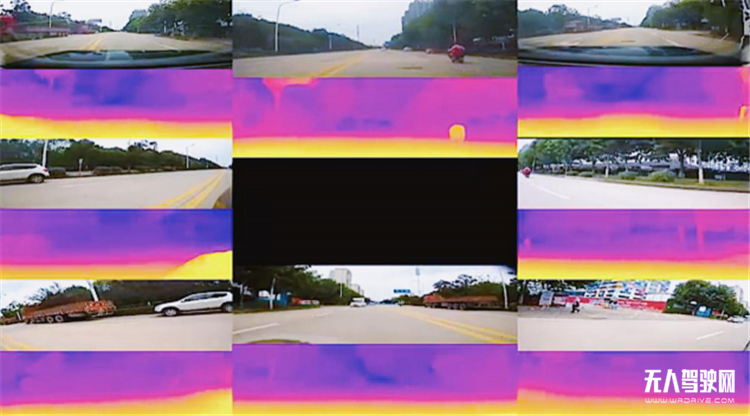
2021年7月14-16日「iCar 智慧车展」(2021第七届中国上海智能网联汽车展览会)在上海新国际博览中心开幕!环宇智行如邀参加展会,率先推出8摄像头自动驾驶感知方案(Athena5.0)。并现场展示了搭载该方案的TITAN系列(L3+)、PALLAS系列(L2+)域控产品。

目前TITAN和PALLAS搭载着全视觉感知方案,已经适配红旗H9等车型,在武汉、苏州展开大规模实车测试验证。
环宇智行这次推出的全视觉自动驾驶方案采用了分层时序网络技术,8个摄像头共享主干网络,主干网络之下设计了64个终端任务,包含检测、分割、拼接、跟踪、深度估计、3D检测、场景记忆、三维重建、预测、驾驶行为分析、危险场景诊断。整个网络体系在实车部署中对推理任务的结果进行了锁步设计。也就是说整个系统在运行时,同时有128个终端任务在运行,整个处理周期在50ms以内。目前该方案已通过多台titan系列控制器分布式部署实现。未来该设计将部署在Areas芯片上,完成All in One的国产交付。
在时序上我们保留了历史2S、预测8S的信息,真正做到了实时记忆和预测。 除了弃用高精度地图,采用实时构建相对地图(不依赖外部的高精度地图数据,导航地图数据即可,也不依赖高精度定位)。我们对障碍物的运动估计使用了动态Slam技术,速度量测精度在2km/h以内(对比激光雷达和毫米波)。
环宇智行在苏州、武汉之间的高速、城区进行了2年的数据积累,数据工程已经覆盖到常见的雨雾天气还有一些极端的暴雨、暴雪天气。在通常的隧道、施工、高架场景下,全视觉方案已经取得了接近高分辨率激光的同等性能。

在硬件上配套上使用环宇智行自研的L3/L4级别自动驾驶控制器TITAN系列、L2~L2+级别自动驾驶控制器PALLAS,具有高可靠、高性能、高算力、集成度高等特点。目前已经运用到多个场景如低速L4园区车、低速无人配送车、L2/L2+高速自动驾驶、自动泊车等。























