


不夸张的说,如果现在没有手握几项无人驾驶技术的专利,都不好意思说自己是大的互联网/汽车公司。
无人驾驶技术定义很简单,就是一项可以感知周围道路环境,自动规划路径并控制车辆行驶的技术,具体构成分为三个核心系统——视觉系统,控制系统,以及导航系统。
我们可以设想一个场景,如果开车去某地,我们通常的操作就是打开地图设定好目的地,再根据导航规划的路线行驶,然后行驶的过程中,通过眼睛观察周围的道路环境,实时根据路况控制车辆前行。
而完成上述的操作,我们需要具备三个条件,实现导航的地图,实时感知能力,以及控制车辆的能力。
以此分析,无人驾驶技术如果想要实现车辆自主驾驶就必须具备上述的三个条件,所以就有了视觉系统——感知周围的环境,控制系统——操控车辆的行驶,导航系统——协助实现路径规划。
对于视觉系统,我个人是比较熟悉,因为当年大学的毕业设计,我主要负责的就是无人驾驶方程式赛车的视觉系统。
视觉系统说白了就是一项感知技术,负责采集信息的设备也都是常见的超声波雷达、毫米波雷达、激光雷达,以及车载摄像头这些传感器。
其中,雷达主要的作用是通过接收超声波/电磁波/激光信号来感知周围的障碍物,并且通过发出信号与接受信号的时间差来判断车辆与障碍物之间的距离;
车载摄像头则是采集图像信息,再将图片转换成二维的数据信息,然后通过数据的匹配来识别车辆周围的环境。
换而言之,视觉系统实际上就是通过这些多传感器的融合,来采集可行驶区域分割、车道线检测、车辆行人等目标检测及视觉测距的信息。
继而再建立统一的坐标系,判断车辆自身在路面上的相对位置,以及车辆周围目标相对于车辆自身的位置和运动状态。
再有了环境感知能力之后,接下来就轮到了控制系统出场。
控制系统可分为三个模块,底层控制、中层控制、高层控制。
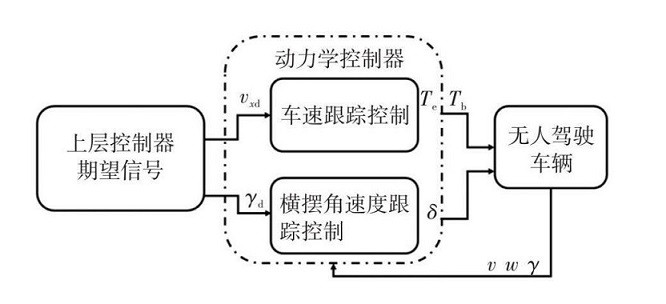
其中,底层控制分为车辆纵向控制和横向控制,顾名思义也就是控制车辆的行驶(包括加速减速),以及转向等行驶操作。
主要原理就是在接受到高层控制发出的期望信号之后,通过大量的算法来控制各大系统(转向、制动、动力)的控制器,比如转向盘的转角、油门踏板的开度等等,实现车辆的行驶操作。
而中层控制,我认为这是控制系统中最难设计的一个部分,因为它的功能很像我们人体的感知反应能力。也就是当遇到不确定情况时,如何控制车辆,让其根据当时的环境做出最佳的反应(模拟人的反应)。
这其中涉及到了一个深度的自主学习能力。也就是说,无人驾驶车辆需要构建很多个环境信息模型,或者说数据库,来作为一个参考信息,而车辆则需要通过自主学习来识别并分类好这些信息模型。
当这些信息模型全都被深度学习标记了之后,算法会根据被标记的信息模型,预测该模型的运动轨迹,然后结合当时情况,计算出最佳的行驶路径,减少碰撞的危险。
而之所以说它难,是因为一来有很多的不确定,不知道潜伏了哪些危害,二来模拟人的感知反应对算法模型的要求很高,三来这还面临很多伦理道德的问题(比如撞一只猫还是撞一幅名画)。
所以无人驾驶要想全面普及,这三个问题必须得解决。
至于高层控制,其主要功能是路径规划和道路导航,这有点类似于传统意义上的“脑力活动”。
因为它是通过一些搜索算法来做一些智能化的判断,一般用于评估各种驾驶行为所需支付的成本,比如等红绿灯的时间,道路拥堵的情况,信号灯的数量等信息的搜索,然后根据搜索的情况,分析出一条最佳路线,极大的减少我们的用车成本。
这种逻辑就很像我们人在思考,“哪条路是捷径”,“这条路我是否可以加快点速度”之类的问题。
而与高层控制互相配合的就是导航系统,其利用GPS,以及高清数字地图,提供地图数据信息,协助高层控制模块,规划路径。
GPS可以帮助车辆定位位置,而高清数字地图则是提供非常非常精确的地图数据,辅助感知周围环境信息,以达到一定精确度要求。
总而言之,目前无人技术的大致框架就是如此,无人驾驶的技术远远不止这些,毕竟仅仅是一个算法模型比如卡尔曼滤波法、多贝叶斯估计法、Dempster-Shafer(D-S)证据推理等。























