


什么是自动驾驶
飞机的自动驾驶功能也是自动控制的一种形式,所谓自动控制就是在没有人直接参与的情况下,利用外加的设备(控制器),使机器、设备(控制对象)的某个工作状态或参数自动地按照预定的规律运行;它通过对系统的输出不断地,直接地或间接地、全部或部分地返回,并作用于系统,其本质是通过信息的传递、处理与反馈实施的一种控制。
 自动控制发展的五个阶段:
自动控制发展的五个阶段:
控制方式
举例
1
机械反馈信号控制
抽水马桶、普通内燃机排气阀门
2
电流模拟信号控制
自动冲水龙头、各类电子传感器
3
计算机控制
全自动洗衣机、汽车发动机电子控制组件
4
分布式控制
服务器、飞机发动机计算机
5
总线式控制
自动驾驶仪、自动油门
飞机的自动控制模式是一种集机械反馈信号控制、电流模拟信号控制、计算机控制、分布式控制为一体的总线式控制,它的控制器与执行器相互分离,并且带有检测器。
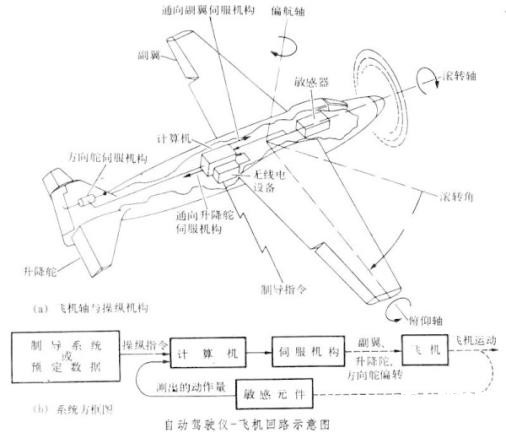 飞机的自动驾驶原理具体描述就是计算机根据探测到的大气数据信息、姿态及加速度数据和导航数据,计算出各阶段符合飞行原理和导航原理要求一些舵面和油门位置参数,通过控制飞机舵面和油门实施飞行,同时检测出各种实际飞行参数与理想状态的差值进行修正。
飞机的自动驾驶原理具体描述就是计算机根据探测到的大气数据信息、姿态及加速度数据和导航数据,计算出各阶段符合飞行原理和导航原理要求一些舵面和油门位置参数,通过控制飞机舵面和油门实施飞行,同时检测出各种实际飞行参数与理想状态的差值进行修正。
自动驾驶还提高一些自动防护功能,包括坡度限制,失速保护,超速保护,防擦尾,防荷兰滚等。飞机的检测器将提供系统状态显示、ECAM警告信息、语音警告、音响警告、失速抖杆、灯光警告等各类反馈和警告信息。
飞机自动驾驶控制目标是要使飞机按照飞行原理来运行,包括满足力矩平衡、稳定性和操纵性的规律,满足升力、速度与姿态三者之间的对应关系要求,同时满足飞行各阶段操纵要求和导航要求包括满足水平航迹、垂直航迹、飞行程序、飞行计划、保护区限制、地形障碍物避让等要求。
飞行原理:
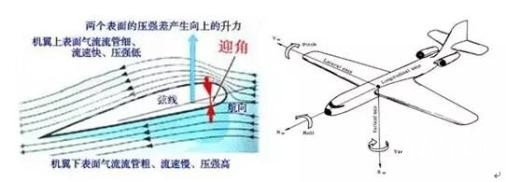 升力:升力是飞机上下表面的压力差造成的,举个例子就是一个快速流动的河流,如果有人掉下去,那么立马就会冲到中间去,为什么呢?因为中间流速快,它的压力就小,两边流速慢,压力就大,它压着你把你就压到中间去了。飞机也一样,由于机翼上下表面是压力差,它设计的就是这样运行的;
升力:升力是飞机上下表面的压力差造成的,举个例子就是一个快速流动的河流,如果有人掉下去,那么立马就会冲到中间去,为什么呢?因为中间流速快,它的压力就小,两边流速慢,压力就大,它压着你把你就压到中间去了。飞机也一样,由于机翼上下表面是压力差,它设计的就是这样运行的;
力矩平衡:在垂直方向就是升力与重力的平衡,水平方向就是拉力与阻力的平衡,但是飞机又不是个质点,它的平衡又没那么简单,从样子来看,它横侧和方向方面,你可以看见它是一个设计对称的,这个平衡是没问题的,在纵向了一看他就是不对称的,它的重心一般是在机身的前半部分,它的焦点又是机翼产生升力作用的中心叫焦点,它一般在重心的后面,那这样的话就会让它有个低头的倾向,为了保持它的平衡就设计了一个水平尾翼,让它产生一个负力矩、负升力,让它抬头,这样就平衡了;
稳定性:飞机飞过去了我们一看就像射出的一个箭一样,我们知道那个箭头比较重然后尾巴有个垂直和水平的尾翼那么它射出去就会比较平直,如果要是没有这样一个设计,你想射出一个筷子是什么感觉,那肯定是风一吹它就偏了,我们的飞机也这样的,在水平方向了,我们有个机翼和水平尾翼能够保持它的稳定性,就像箭的箭尾,比如说你受到一个扰动使它抬头了,迎角就变大了,那么机翼的升力也会变大,自然就会使它低头,尾翼也是由于迎角变大,它本来是负的,现在变成零或者是正的了,那么它就会也是让它低头,两个这样的力矩就会让它恢复原位.在方向控制这方面一个是机身一个是垂尾,如果机头偏了那么机身和机尾会自然就让它回正,在横滚方向了,在我们飞机设计的时候就是一个下单翼的后掠角设计,在受到一个扰动发生左滚转的话,那么左侧机翼的升力就会变大,使它自动回正,由于这个稳定性的设计,造成了一个荷兰滚现象,比如说你在做左滚转的时候,自然会产生机头的左偏,由于方向方面有一个平衡性,机头应该会摆正,那它就会产生一个震动摆动,这个就是荷兰滚,但我们飞机在设计的时候会规避这个荷兰滚,首先是个大垂尾,然后再加了个偏航阻尼器,人工也是可以摆脱的,如果你左滚转的话,那么就蹬左舵,使它头不要摆正,
操纵性:操纵性和稳定性是相反的,稳定性越好,操纵性越差,在设计的时候会考虑到一个最优值,同时我们在配载的时候会引起重心的前后变化,那这个时候要通过一个配平来改善我们的操纵性
指示空速:指示空速我们飞机上有个动压管,那个动压管就是测动压来指示空速的,他就假定那个密度ρ是恒定不变的,就是海平面那个ρ,根据升力公式我们可以推出了迎角与动压是成反比的,由于动压和指示空速又成正比那么这样的话迎角和指示空速就成反比的,也就是说在高度不变的时候,加速那么就要减小迎角,减速就要增大迎角,飞机的所有操控都是以指示空速为根本的,由指示空速我们就引出来失速的速度,由于一个迎角对应一个速度,最大的迎角对应的那个速度,就是失速速度,对一个C类飞机来说,一般它的入口速度也就是它的1.3倍的失速速度,还有它的起飞安全速度也是1.3倍的失速速度,大概在130到150节之间,起飞安全速度大是因为它起飞重量大而导致的,根据这个数值我们可以算出来,大概一个C类飞机的失速速度是在115节左右,所以任何时候飞行员都不能低于这个指示空速来飞行,飞行员最重要的事情就是保持指示空速,然后由指示空速对应一个姿态,同时在低速的时候,大坡度盘旋会对失速速度造成影响,增加它的失速速度,所以要更加注意。
休息5秒钟,插播一则广告!
还想了解更多飞机?
《航空知识》资深编辑倾力编译
《飞机全书》你值得拥有,点击图片即可购买
飞行各阶段操纵要求:
 首先是在起飞爬升阶段,在起飞的时候我们计算机要算出来一个决断速度V1,抬轮速度V2,还有起飞安全速度VR,也就是1.3倍的失速速度,我们飞机在离地的时候,由于地面摩擦的突然减小那么它俯仰的配平就会打破,机头自然就有一个上仰的过程,那么这时候需要一个压杆,当我们飞机出现一个正的上升力的时候就需要收轮了,当飞机的速度达到了V2加10节的时候,就要保持这样一个速度,进行一个大坡度的爬升,这个保持速度爬升的好处就是不用干预它的俯仰平衡了,一般如果没有近的障碍物的话,会在400英尺的时候改平,然后加速到绿点速度,在加速的过程中会有一个收襟翼速度指示,逐渐把襟翼收光。如果有近的障碍物,要在1000英尺的时候改平加速到绿点速度,在10000英尺以下了就保持这个绿点速度进行爬升或者在250节以内,然后就到了巡航阶段,巡航阶段首先是计算机计算出来一个最经济的速度,这个最经济的速度就是又省时,又省油,就像我们的汽车在90公里的时候是最省油的,但是我们一般会抬到120因为我们的时间也是成本,那么飞机也是绿点速度应该是比较省油的速度,但是最经济的速度应该是1.3倍的绿点速度,计算出这样一个速度以后,我们的飞机首先加速到一个经济速度,然后保持这个速度进行爬升,爬升到我们要求的高度,这样爬升的好处还是姿态比较稳定,由于高空空气比较稀薄,密度比较小,那么它的真空速度跟密度相对应的,那么真空速度就会很大,我们指示空速一般在高空也就290或者300节左右,但是真空速度可以达到400多,马赫数可以达到0.78至0.82之间,由于这马赫数比较大了就会产生一个激波,会使我们的焦点后移,这个时候还需要一个马赫配平。然后就是到了进近和着陆阶段,首先是速度降到一定程度的时候就可以逐渐放襟翼,放起落架,然后切盲降,到决断高度的时候切断自动驾驶仪,然后逐渐的把油门收光,收油门的过程中由于推力的变小,它自然有个低头的动作,俯仰配平自然会低头嘛,然后我们就逐渐的带点杆,直到飞机接地,由于地面受到一个大的摩擦,机头会有个下仰下浮的动作,我们就要带点杆。
首先是在起飞爬升阶段,在起飞的时候我们计算机要算出来一个决断速度V1,抬轮速度V2,还有起飞安全速度VR,也就是1.3倍的失速速度,我们飞机在离地的时候,由于地面摩擦的突然减小那么它俯仰的配平就会打破,机头自然就有一个上仰的过程,那么这时候需要一个压杆,当我们飞机出现一个正的上升力的时候就需要收轮了,当飞机的速度达到了V2加10节的时候,就要保持这样一个速度,进行一个大坡度的爬升,这个保持速度爬升的好处就是不用干预它的俯仰平衡了,一般如果没有近的障碍物的话,会在400英尺的时候改平,然后加速到绿点速度,在加速的过程中会有一个收襟翼速度指示,逐渐把襟翼收光。如果有近的障碍物,要在1000英尺的时候改平加速到绿点速度,在10000英尺以下了就保持这个绿点速度进行爬升或者在250节以内,然后就到了巡航阶段,巡航阶段首先是计算机计算出来一个最经济的速度,这个最经济的速度就是又省时,又省油,就像我们的汽车在90公里的时候是最省油的,但是我们一般会抬到120因为我们的时间也是成本,那么飞机也是绿点速度应该是比较省油的速度,但是最经济的速度应该是1.3倍的绿点速度,计算出这样一个速度以后,我们的飞机首先加速到一个经济速度,然后保持这个速度进行爬升,爬升到我们要求的高度,这样爬升的好处还是姿态比较稳定,由于高空空气比较稀薄,密度比较小,那么它的真空速度跟密度相对应的,那么真空速度就会很大,我们指示空速一般在高空也就290或者300节左右,但是真空速度可以达到400多,马赫数可以达到0.78至0.82之间,由于这马赫数比较大了就会产生一个激波,会使我们的焦点后移,这个时候还需要一个马赫配平。然后就是到了进近和着陆阶段,首先是速度降到一定程度的时候就可以逐渐放襟翼,放起落架,然后切盲降,到决断高度的时候切断自动驾驶仪,然后逐渐的把油门收光,收油门的过程中由于推力的变小,它自然有个低头的动作,俯仰配平自然会低头嘛,然后我们就逐渐的带点杆,直到飞机接地,由于地面受到一个大的摩擦,机头会有个下仰下浮的动作,我们就要带点杆。
自动驾驶能做什么,作用是什么,对飞行的促进意义、影响
自动驾驶能够提供飞机的自动导航、自动飞行、自动推力、限制与保护功能,在飞机起飞后一直到落地前决断高度前(一般60米)在正常情况下可全程实现自动驾驶,通过自动驾驶飞行员把常规符合飞行原理和导航原理的操纵交给自动驾驶,大大减小了工作负荷,可以留出更多时间让飞行员监控飞机状态、观察运行环境、处置突发一般情况、提高飞行效率、节约飞行成本。在重大系统故障、飞机结构严重受损,传感器失效、积冰、失去平衡、失速、与其他航空器危险接近、地形告警、雷雨绕飞、风切变该出、紧急上升或下降、机动飞行、强烈颠簸等情况发生时需要立即人工干预。
自动驾驶对飞行员的影响,过度依赖的后果,会不会影响关键时刻的判断力
对自动驾驶的依赖会使飞行员逐步丧失很多飞行技能,一个囚犯如果被关闭在一个独立的房间禁止与人说话,那么一段时间后他将丧失说话能力,连说话这种我们认为是想当然的能力都会丧失,更何况飞行技能,同时许多关键的判断只有做出创造性判断才能妥善处置,而自动驾驶最不擅长的就是创造性判断。自动驾驶仅类似与人的潜意识的功能,而自动驾驶不具备人的主观意识功能,这也是当前阶段自动驾驶最致命的缺陷,但人的主观意识也经常收到环境压力、生理和心理上的影响,同样不靠谱,最优秀的飞行员应该是既懂得充分利用自动驾驶和潜意识,也会在关键时刻发挥主观意识的作用,同时能避免受到干扰,具体可以参考“华晨不是BMW”民航资源网博客文章“从潜意识层面看自动驾驶依赖症”。
随着飞机可靠性的提高和导航技术的提升要求在PBN航路和RVSM空域由于控制精度的要求必须使用自动驾驶,自动驾驶使用时间日益增加,造成许多飞行员的基本飞行技能长期不能得到使用,在自动驾驶故障或特情发生时容易酿成大祸。比如说,在飞由塔台雷达引导的非标准进近程序时,国内外频频出现地形警告和落错跑道的事件,这是由于之前飞行流量小的时候,一般按照标准飞行程序进近,这就造成飞行员长期依赖自动导航,逐渐丧失对地形了解和方位的辨识能力,到了今天,航班流量大增,多跑道多机场运行逐渐成为新常态,管制员必须频繁进行雷达引导,在偏离了预定路线后,加上飞行员原有能力的丧失,就很容易触发地形警告和落错跑道。还有最近发生的亚航飞机进入雷暴云区坠毁事故,这个很像当年法航447航班的情形,调查显示法航飞机进入雷暴云后,空速管探头积冰后失效,飞行员在失去速度和高度参考后完全迷失,飞机坠毁。其实从理论是完全可以避免此次空难的,飞行员可以凭借飞机内部的陀螺仪和加速度计获取飞机的姿态信息和升降速度信息,从而保持平飞,在飞出云区后,通过传感器探头加温重新恢复速度高度指示,恢复正常飞行。去年韩亚航空777飞机在飞抵洛杉矶机场的时候自动油门出现了故障,在座的777机长眼看着飞机严重低于下滑道并且接近失速速度,也没有进行积极的干预,最终导致了飞机在降落过程中机尾撞了防波堤致使一起空难的发生,之后FAA的调查结果就表明飞行员过度依赖于自动驾驶。其次是华航006航班的事件,747飞机在3万英尺的时候,突然有一台发动机发生了故障,飞机发生了侧滑,飞行员也是相信自动驾驶没有进行人工干预,飞机急速降高度,好在是最后飞行员脱开自动驾驶进行人工干预把飞机在1万英尺改平。前不久的台湾复兴航空关错发动机坠毁事件也可能与自动驾驶依赖症有关,不但关错了发动机,空中重新启动发动机的程序也未必正确,连一个最基本的开关发动机的程序都会弄错,这个不能简单归因于技术问题或是个人主观意识问题。
 自动驾驶的发展趋势,民航客机能否实现无人驾驶
自动驾驶的发展趋势,民航客机能否实现无人驾驶
驾驶舱设计原理(具体可以参见“华晨不是BMW”民航资源网博客文章“小驾舱、大世界”)
人
责任区域分工,交叉检查,标准喊话,起飞进近简令,训练
机
杆、舵、配平,电子控制面板,飞行显示器、导航显示器
料
MCDU(多功能控制显示组件),飞行计划、气象信息、配载信息、性能信息输入
法
FCOM、SOP、QRH,航行资料、性能手册,飞行运行总手册
环
人性化黑暗安静驾驶舱原理,“声、光、电、动”电子显示和警告信息,系统状态与警告显示器
 现代驾驶舱的设计已经为进一步的自动化奠定了基础,原理上在正常情况下,不需要做出创造性或复杂的判断时,驾驶舱的一切动作都可以实现自动化。
现代驾驶舱的设计已经为进一步的自动化奠定了基础,原理上在正常情况下,不需要做出创造性或复杂的判断时,驾驶舱的一切动作都可以实现自动化。
比如说,在操作方面的我们从发动机启动开始一直到驾驶杆的操作,直到各类电子控制面板的接通、断开和选择都是人工操作的,如果这个过程将操作手册和sop以及检查单作为一个电子包和一个逻辑来录入计算机,那么计算机完全可以代替人工来实施一般操作。
其次是目前飞机起飞之前和在航路飞行过程中的一些数据获取与分析,比如说气象、航行资料、通告、配载、飞行计划等目前都是是人工完成的。这些也可以做成一个数据包,进入计算机系统,计算机完全有能力分析这些数据,减少了很多外围单位人工提供的服务,其次让再看看故障处理,在飞行中飞行员遇到故障往往是通过QRH手册来进行处置操作,同样我们把QRH以及排故的操作手册,作为一种计算机可以读懂的语言,录入到计算机模块当中,那么在发生小故障的时候,计算机除了拥有备份系统以外,它又能读懂这些排故手册,似乎实现计算机自动处理小故障也是可行的。飞机系统都是多备份的,它完全可以自动转换到一个好的通道上来。空中还有一些预警处理,比如说雷达气象预警,风切变预警,地形预警,构型预警 ,空中交通警戒,但在目前的状态下它只是提供这种警戒,不自动处理。计算机完全可以自动避让,自动改出风切变,另外一个需要人工干预的就是空管信息,我们知道空管要提供放行许可,如果这种放行许可也可以成为电子数据,传于计算机当中,那么空管这部分的人工干预,也可以由计算机来自动完成。
目前谷歌公司已经成功完成无人驾驶汽车的30万公里测试,它是基于大数据后台运算的人工智能服务,对于飞机来说尽管也可以如此,但飞机由于悬浮在空中发生任何紧急情况都不允许它暂且停留在空中某个位置,所以它对于人工智能的要求会更高一级,目前FAA推出了一个民航客机在10年内实现单人驾驶的计划,并且地面配备有副驾驶对飞机进行监控,以免在机组失能或判断错误时接替或者提醒,这个计划是比较现实的。
 实现无人驾驶的最后障碍就是人工智能要具备不断自我更新和不断打破常规的能力,如果实现了这点民航客机的无人驾驶将彻底实现,但人工智能具备了这项能力之后,也可能是人类的一场灾难。
实现无人驾驶的最后障碍就是人工智能要具备不断自我更新和不断打破常规的能力,如果实现了这点民航客机的无人驾驶将彻底实现,但人工智能具备了这项能力之后,也可能是人类的一场灾难。
比较可能的一种形式就是像军用无人机那样,比如说中国的无人机翼龙,正常情况下翼龙是自己在飞的,如果出现一些特殊情况或者飞机操纵不了的,下面有个人,有个驾驶杆,有个显示屏,进行一个人工操纵,相当于遥控飞机一样,但是能够直观的显示。























