自动驾驶汽车研究有两条不同技术路线:一是单车智能,即通过摄像头、雷达等传感器以及高效准确的算法,赋予车辆自动驾驶的能力;二是车路协同,即同时在车端和路端安装各种传感器,打造“聪明的车+智慧的路”,让人、车、路、云高度融合,互为补充。
虽然国内外企业都曾将重心押在单车智能上,但随着车路协同在自动驾驶能力、安全性和城市交通管理方面的优势逐渐显现,全球几大自动驾驶强国纷纷将战略重心由单车智能转移到车路协同上,例如,美日韩等国纷纷制定智能道路标准,要求高级自动驾驶必须要有车路协同的参与,而在我国,车路协同更是被认为实现自动驾驶的重要方向。
车路协同可应用在哪些场景,带来哪些效益?与自动驾驶关系又是如何?作为国内深耕车路协同解决方案的企业——北京觉非科技有限公司(以下简称“觉非科技”)联合创始人刘斌给出了他们的答案。

觉非科技联合创始人刘斌
01车路协同的二次革新——路侧融合感知系统“知寰™”
从“十三五”首次提出智慧公路建设到“十四五”正式发布以来,智慧公路建设发生了显著变化。一是智慧公路或车路协同的场景由“单一场景”向“复杂场景”进行演变;二是示范项目从“单一的专项示范”逐步走向“综合示范”;三是车路协同建设场景由高速公路延展到城市道路。
示范项目的快速发展,导致产业对于路侧感知的认知不断升级,由以前“大而全”的建设思路,逐渐转换成“专而精”的建设方向。因此,对于道路的全面态势感知,成为了产业内亟待解决的问题。
7 月 9 日,觉非科技重磅发布了路侧融合感知产品与解决方案知寰™。觉非科技创始人刘斌表示,知寰™是一款软硬一体化解决方案,它既是以多传感器融合感知和高精定位为核心应用的技术体系升级,也是中国车路协同的第二次技术革新。
据刘斌透露,知寰™解决方案将整个车路系统所应用到的感知硬件和计算平台整合到一起,在性能上,知寰™解决方案做到了多项创新,且主要集中于三点。
一是多传感器的兼容。知寰™将激光雷达、工业相机、毫米波雷达等传感器集成于一机体内,把摄像头的影像能力、激光雷达精准测距的能力、毫米波雷达全天候的能力有机地融合在一起,以此来进一步提高感知的精准性。
二是整合高算力计算平台。觉非将高算力计算平台整合进知寰™,具备强大的全场景环境感知算法模型以及面向 V2X 的激光点云 SLAM 技术,是一套可实现高精度、全数字化、全生命周期的路侧全集感知系统。
三是强大的时空同步能力。为了解决时空同步的问题,觉非科技在知寰™中同时配备了自研的基于 FPGA 高精度授时板卡,采用传感器统一授时,同步 UTC 时间,误差不超过 100 微秒。结合丰富可扩展的多传感器融合交通算法库,以更低的计算时延提供单点精准感知和及时的管控触达,为车路协同各类应用场景提供感知和定位软硬一体化解决方案。
可以看出,知寰™系统在设备的安装与应用方面,不但进行了非常多的简化设计,同时更增加了车路协同所需要的技术能力。刘斌认为,对于觉非来说,这是设备能够实现量产的前提,而对于行业整体而言,是车路协同方案未来能够大规模应用的关键。
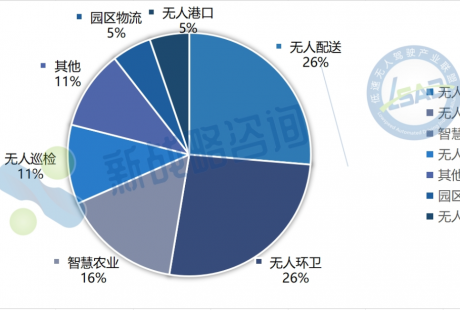
目前,基于强大的创新性以及便利性,知寰™解决方案已应用于多种场景,如城市道路、园区、港口、高速公路等。
其中,在港口这一场景,觉非科技正在和西井科技进行合作,而以知寰™为核心的智慧港口路侧融合感知解决方案,则正在西井科技的自动驾驶场地进行测试验证。
刘斌表示:“在港口场景中,由于车路面积不宽以及集装箱、塔吊等物品的遮挡,无论是无人驾驶物流车亦或是无人驾驶集卡,都会存在一些盲死角引起的信息感知缺陷问题。而车辆行驶到盲死角区域,如果感觉不到突然窜出来的人或物体以及其它车辆,就会出现急刹车乃至翻车现象,这将极大地影响场景中的运营安全和运营效率。而使用路侧融合感知技术,就相当于为车辆装上了“上帝视角”,将港口中信息覆盖不到,或感知能力弱的地方进行了补充和完善。”
刘斌提到,港口场景的挑战主要来自于两部分,一是运输车体较大,在装上集装箱后,车辆尾部或车辆侧面产生大面积盲区;二是众多集装箱堆叠起来,所形成的高度差会对无人驾驶集卡造成遮挡。
基于此,目前觉非科技在给西井科技提供智慧港口路侧融合感知解决方案时,优先会将知寰™设备安装在了容易产生感知盲死角的区域。“路侧设备安装较高、距离相对较远,所以它的感知能力要比单车更加全面,在整体方案的加持下,无人驾驶车辆感知精度更加精准。”
而在城市道路场景,觉非科技早在 2020 年便在上海嘉定智能网联新型示范区部署了知寰™系统,并搭建了“车道级交通事件检测系统”。
通过知寰™系统的数据融合能力,并依靠点云、图像、毫米波的 3D 目标检测与跟踪的深度学习能力,结合车道级高精数据,实时输出交通流量、交通事件及目标定位信息,并传输至云端管理业务平台,从而实现对城市交通的数字化管理,并为交通参与者提供安全保障。
而 2021 年知寰™也将在上海嘉定进行大范围部署,助力城市交通实现基础设施智能化与管理精细化的全面升级。

图:觉非携手上海智能网联示范区 智能网联城市全息路口解决方案
02注重产品价值的实现
从大方向看,觉非当前似乎更加注重在特定场景内的应用。但刘斌表示,觉非在场景方面其实并没有限定,只是就当前来说,在这些领域,运营模式和效能提升方面会有一个比较清晰的界定。
“不管什么场景,车路协同,如果只有路没有车其实没有意义,供需双方是一定要匹配的,所以我们目前还是希望更多的做一些有价值的东西,能够真正带来实际的效益提升。”
当前车路协同基本处于辅助信息交互阶段,这一阶段的车路协同解决方案的挑战之一便是在各类场景中实现良好的商业模式。因此在特定环境下的车路协同可以更好地实现落地,企业们可以使用能够接受控制指令的智能车辆,通过协同控制的方式提高原有系统的效能。这也是当前为什么车路协同方案在特定场景中能够更快落地的原因。
同时刘斌也提到,近些年车路协同的关注点正发生明显变化,从场景覆盖率以及产生了哪些数据,逐渐转化为车路协同解决方案背后的运营逻辑。例如,当前智慧交通的交管中已包括了交通数据采集、信号优化、交通诱导、交通状况监测及应急处置等业务,
但对于车路协同解决方案而言,并不是另建一套系统进行交通管理,而是作为一个补充融入到原有系统中,解决原有技术解决不了的问题,将效应发挥出来。因此,无论是城市道路、港口、园区,亦或者是高速公路,其背后的逻辑都是一致的,都是将整个车路协同产生的路侧数据闭环起来,让终端使用客户将收益发挥出来。同时,也能增进自身的业务收益。据悉,在港口应用场景,觉非科技目前已经探索出了一条可持续发展的逻辑模式。
从整体的市场角度来看,车路协同仍处于初级阶段,具体实现的技术、商业模式、建设模式都还在探索尝试,但正是这种不确定性,给车路协同产业发展的带来了丰富性和多样性。而在探索的过程中,我们也期待能够出现更多像觉非科技一样的企业,去推动行业的不断发展。