0 前言
随着科学技术的发展,无人机、无人坦克和无人潜艇等各种无人驾驶武器系统开始出现在战场上,其作战任务也从深入敌后进行侦查发展到发射导弹炸弹直接进行攻击。与其他武器系统相比,这些武器系统具有自己的特点,如需要实时传送高清视频信号,需要对其进行远程操作控制。传送回来的高清视频图像一方面作为侦查的结果提供给有关作战人员使用,另一方面作为遥控人员操作控制的依据。
这两个特点,正好涉及到控制中心显示控制系统的工作,本文从显示控制系统的角度提出并研究用于无人驾驶系统(以下简称无人系统)的显示控制群自组织问题。
1 问题的起因
从一个简单的例子谈起:设有N (N>2)个无人机系统对某一地区进行扫描侦察,在任务规划时,可以规划出一个执行任务的最佳方案,例如覆盖更大的区域,避免活动目标被遗漏等[1]。在执行任务时,如果其中一架无人机被击落,剩余的无人机的行动就需要进行调整,执行新的方案。被击落的无人机位置不同,调整的方案可能就不同,应对的行动变化也就不同。如果又有一架无人机被击落,剩余的无人机的行动需要再次调整。现在如果有新的无人机发射升空,又需要调整各个无人机的行动方案。
这实际上就是需要N个无人机组成的系统群在执行任务时能够自动组织起来,相互配合,调整各自的行动,适应变化的环境,随时形成优化的方案,以达到更好的执行效果。不仅是无人系统群构成变化、环境变化,如果任务发生变化,这个无人机组成的系统群也要及时相应地做出改变。事实上,在控制中心显示控制系统建设中,已经遇到类似的问题。在控制中心有数千台设备在工作。为了完成某些任务、在实现某些功能时,通常需要许多不同类型的设备协调动作。不仅在控制中心内,控制中心之间也有设备协调控制问题。为了解决显示控制系统的控制问题,采用数学中群论的方法,形成了显示控制群的自组织方法。这个方法可以应用于N个无人系统组成系统的自组织、自适应问题。
一般地,当有N个设备(可以是无人系统,也可能是不同种类、不同功能、不同型号的设备)需要协调工作、完成多目标任务时,根据显示控制群论的方法,需要进行如下工作。
(1)设备的形式化:通过定义虚拟设备的概念,使控制系统能够统一地组织、控制各种各样不同种类、不同功能、不同性能、不同操作动作和不同状态表示的显控系统中的设备(或武器系统)。
(2)组成显示控制群:虚拟设备组成被称为显示控制群(简称显控群)的系统。从而形成把对全域的虚拟设备协调统一控制分为多层次的对各子显控群的控制,通过对子显控群的控制实现对全域设备的控制,而且这种控制可以分布式通过虚实设备转换实现。
(3)设备的形式接口:包括(a)提供一个命令集,用于接受显控群发来的命令。通过执行这些命令,设备(或武器系统)能进行显控群所需的全部操作,实现其功能。(b)提供一个状态集,用于向显控群报告设备(或武器系统)的状态,使显控群能了解它对命令的执行情况,对功能的实现情况。
(4)显控群的自组织:虚拟设备命令集中的命令在执行时对先后顺序的要求形成了一种时间的前提关系,可以用于自动形成命令的执行序列和并发执行。命令集在执行时对设备的需求形成了一种空间的前提关系,可以用于自动组织起一组设备的空间组合。通过虚拟命令,显控群可以自动组织起一个实现某种功能的子显控群。而一个显控群最大的子群就是它自身,即显控群可以实现自组织。
(5)显控群的自适应:一个显控群,不论把它断成几段,每一段都还是显控群,会重构适应改变了的情况,完成预定任务;如果重新连接,又会自动恢复成一个显控群。这就是建设打不垮的指挥控制系统的一个重要理论基础。
(6)演化硬件方法用于自组织:演化硬件是指一种能动态自主重新配置自身结构的硬件,一种具有在线适应性的硬件。显控群采用这种方法,实现在遗传算法控制下的可优化的自组织,使显控群能够通过对环境的感知和与环境的交互来动态适应变化的环境。
2系统的控制结构
当把显示控制理论用于无人系统的自组织时,首先要讨论系统群的控制结构。可以有三种形式的控制结构。
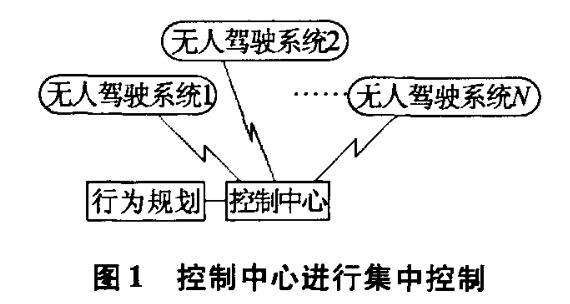
(1)通过控制中心,进行集中规划、集中控制如图1所示。这是传统的直接由控制中心实施控制的方式。
(2)没有固定的控制中心,而是由各无人系统分布式轮流担任控制中心,进行集中规划、集中控制如图2所示。这是一种令牌环控制方式。由获得控制权的无人系统成为控制中心,并实施控制。经过一段时间,把控制权转交给下一个无人系统,使之成为控制中心进行控制。只要把任务注入系统,这些无人驾驶系统就自动组织起来,始终存在一个控制中心,组织各系统完成任务。如果担任控制中心的无人驾驶系统被击毁,剩余的系统会由于超时而产生新的控制中心,继续进行工作。如果某一作为控制中心的系统发现有其他控制中心存在,就比较系统编号,编号小的自动停止运行。这就保证了只有一个控制中心在工作。
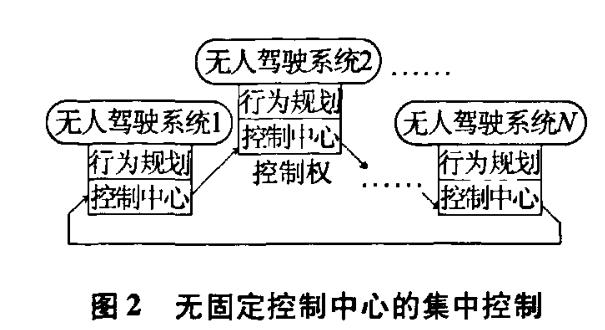
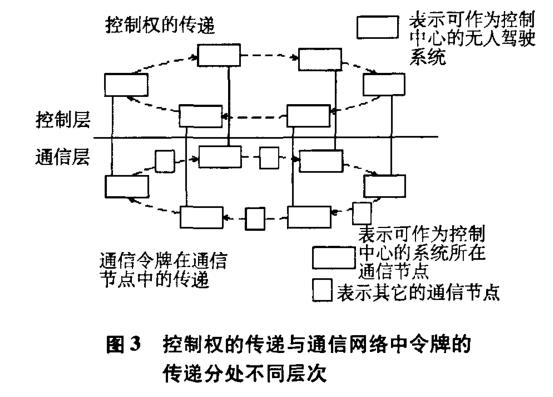
图2只是表示了控制权的轮循,实际还有各无人系统之间的通信问题,也可采用无线令牌的方式,此时会形成两层令牌的传递如图3所示。图中底层是通信网络的令牌在传递,上层是控制权的传递,各自传递各自的,互不影响。这说明控制权的传递与通信网络中令牌的传递不是一回事。通信网络中令牌的传递要比控制权的传递快得多,且传递的方向也可能不同。
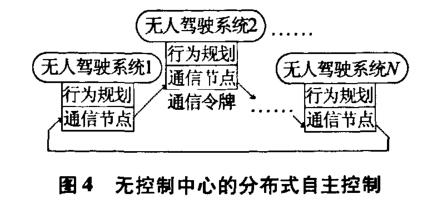
(3)没有控制中心,各设备(或武器系统)分布式规划行动,进行民主集中式的行动方案选择,实现分布式的控制如图4所示。此时虽然没有控制中心,但还需要各无人系统之间的通信,例如可采用无线令牌方式进行通信。
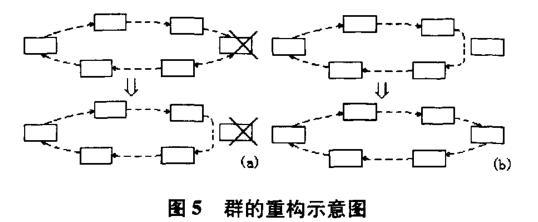
控制结构(1)和(2)的区别是一个有固定的控制中心,另一个是由无人系统轮流担任控制中心,其控制方法基本相同。显然,系统进行自重构、自组织是指控制结构(2)和(3)这两种控制形式。在这两种情况下,当某一无人系统被毁,剩余的无人系统能自动重新组成群如图5(a)所示。反之,如果有新的无人系统加入,也能进行重构如图5(b) 所示。这种重构能力是令牌传递方式所支持的,新加入的无人系统可根据编号顺序自动加入群。
三种结构虽有不同,但控制方法是相同的,即根据各系统的当前状态,找出群下一步的行动方案,使各系统协调动作。控制结构(1)和(2)都是由控制中心计算出群的行动方案,然后注入其他无人系统,使其执行。控制结构(3)是由各无人系统各自计算出群的行动方案,然后对这些方案进行一次方案评价分数的排序,分别都取得分最高的方案来行动,得分相同的按无人系统的编号排序。于是各无人系统虽然分别计算,却都取到同一个方案,因此称为民主集中式的方案选择与控制。
3 自组织的控制方法
根据显示控制群论的方法,各种设备、各个无人驾驶系统,都可以形式地表示为接收命令、返回状态的虚拟设备,c是此设备接受命令的集合,s是这个设备状态的集合。
由N个设备组成的系统,可以定义为一个显示控制群(简称显控群)。这个群可以根据要完成的任务,自行组织虚拟设备工作,并且在情况发生变化时重新组织设备。
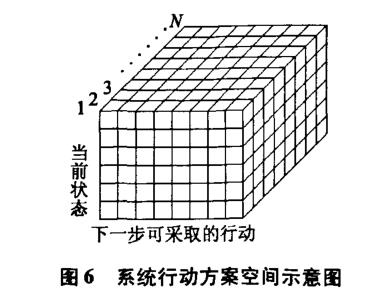
设有N个无人系统作为N个个体,也可视为N个虚拟设备。每个个体有自己的当前状态,有行动的可选方案如图6所示。这就构成了一个群的行动方案空间,于是确定各无人系统下一步的行动,就成为在此空间的一种搜索。

于是采用遗传算法在方案空间中进行搜索,形成系统群的下一步行动方案。这是显示控制群自组织的演化硬件方法的一种应用。当无人系统;(1≤i≤N)被击毁,空间中该系统的状态不再有效,作为系统群将重新在方案空间中找出嚎新曲线,成为其余的各无人系统的行动依据。
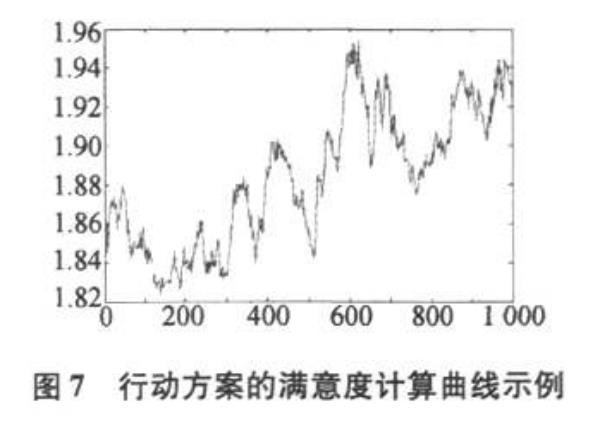
软件仿真是用MATLAB编程进行的,群体的规模设为16,交叉概率设为0.6,变异概率设为0 001。运行的结果如图7所示:16个无人系统选择行动方案的满意度计算曲线。从曲线可以看出当评价函数值达到1.9时的迭代次数。仿真程序中迭代1000次,以便观察评价函数值形成的曲线。
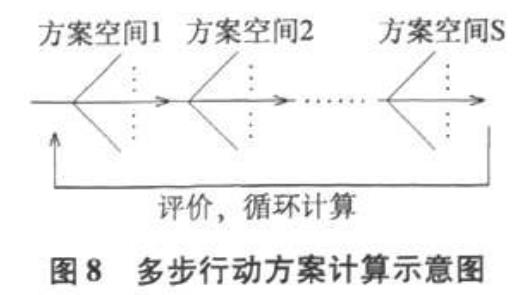
有时需要得到不止下一步,而是多步甚至是全部行动方案时,可进行连续计算如图8所示。前述的评价函数称为横向评价函数。多步计算的评价函数称为纵向评价函数。此时不存在硬约束的情况,需规定每步的满意度最低分值,并计算总分.得到评价分。
在结构(1)和(2)的情况下.控制中心将各无人系统的方案分发各系统。
在结构(3)的情况下,每个无人系统分别各自计算出行动方案,并分发给其他无人系统。各系统分别对这~种方案进行排序,取得评价分最高的,若得分相同则取编号靠前的。这样各自分别自动找到一个相同的方案,并寅施行动。当无人系统增加或减少,则重新计算方案,以适应变化的情况。
4 结语
本文将显示控制群的设备自组织方法用于无人系统群的自动控制技术研究。采用显控群理论和方法,使无人系统组成的系统群形成自组织自适应的作战能力。这个方法可以用于未来战争中夫规模的机器人群的自组织作战。即使失去人工操作,这个群将继续上作、能自行组织,形成优化的作战方案,并尽最大可能来自动执行预定的作战任务。