


人工智能在未来必将受到高度关注。
说到人工智能,就不得不提自动驾驶技术。
现今的自动驾驶技术,还不能称为真正意义上的人工智能,因为其不能在功能上实现完全的类人判断。
与自动驾驶汽车相比,人类驾驶员特别擅长通过观察和使用简单的工具来导航他们以前从未驾驶过的道路。只有给自动驾驶汽车带来更多类似人类的推理与判断,它才能像人类驾驶员一样,只使用简单的地图和可视化数据,便能够在新的复杂环境中实现自主导航。
然而,技术的瓶颈使得无人驾驶汽车很难做到这一点。在每一个新的复杂地区,自动驾驶汽车必须通过数字地图分析所有的道路,而这一过程不仅非常耗时,更与人类的驾驶习惯相悖。具体来说,现今的自动驾驶系统高度依赖数字化地图(这些地图通常是通过3d扫描生成的),这些地图的生成和实时处理需要进行大量的计算。新型端到端系统:自动驾驶技术新突破
在未来,我们需要一种自动驾驶控制系统,仅使用摄像机数据和一个类似GPS的简单地图,就能“学习”人类司机行驶时的驾驶模式,而这才是未来人工智能所必经的道路。我们要求该自动驾驶系统经过训练,就可以模仿人类驾驶员来控制无人驾驶汽车沿着计划好的路线行驶在一个全新的未知区域。与人类驾驶员类似,我们还要求该系统能检测出地图与道路特征之间的任何不匹配问题用以及时的确定车辆当前的位置、传感器状态或地图定位问题,以便实时纠正汽车的航向。
一种新型的端对端导航系统,为实现上述特点带来了希望。
传统的导航系统通过多个模块来处理传感器的数据,这些模块为定位、映射、目标检测、运动规划和转向控制等任务定制。多年来,无数的科研团队一直在开发一种“端到端”导航系统,该系统能够直接处理输入的感官数据和输出的转向命令,而不需要中间任何专门的模块。然而,到目前为止,这些模型都是严格按照安全路线设计的,没有考虑真正驾驶时的随机目的地问题。
传感器
近期,麻省理工的研究人员改进了现今的端到端系统,使得自动驾驶汽车在一个以前从未训练过的现实环境中实现了安全的驾驶。为了做到这一点,麻省理工的研究人员训练该系统,要求其能预测在任何给定的驾驶时刻所有可能的驾驶指令,这在概率论中被称为全概率分布。具体在训练时,使用的是常规的卷积神经网络(CNN)机器学习模型,该模型被广泛用于图像识别领域中。具体来说,在训练过程中,系统首先从人类驾驶员那里观察和学习人类如何的驾驶汽车,CNN模型将方向盘的转动与它通过摄像机和输入地图观察到的道路曲率联系起来。通过大量数据的训练,它学会了在各种驾驶情况下发出最有可能的转向指令,这使得该系统可以轻松应对各种道路。不负众望:道路实测
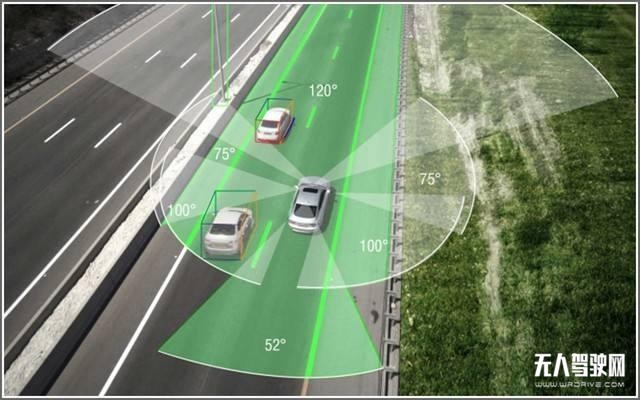
在测试中,研究人员向系统输入一张随机选择路线的地图。当驾驶时,该系统从摄像头中提取视觉特征,使其能够预测道路结构。例如,它识别一个遥远的停车标志或路边的换行标志,作为即将到来的十字路口的标志。在任意时刻,它都使用其预测的转向命令概率分布来选择最有可能遵循其路线的命令。
麻省理工的研究人员说,该系统最出色之处是其能够使用易于存储和处理的地图数据。通常的自动控制系统往往使用激光雷达扫描来创建大规模、复杂的地图信息数据,仅存储旧金山一个城市就需要大约4,000 GB (4 TB)的数据。而对于每个新目的地,汽车又必须创建一个新的地图,这意味着要重复处理大量的数据。而对于这一新系统,研究人员使用的地图只需要40GB的数据就能捕捉到整个世界的任意一条道路。在自动驾驶过程中,系统还会不断地将其视觉数据与地图数据进行匹配,并记录任何不匹配的地方。这样做有助于自动驾驶汽车更好地确定它在道路上的位置。如果输入的信息相互矛盾,它还能确保汽车保持在最安全的路径上。比如,如果汽车在一条没有转弯的直线上行驶,而GPS显示汽车必须右转,汽车就会知道是继续直线行驶还是停下来。
结尾:砥砺前行 路在远方
自动驾驶技术在不断的完善,也寓意着人工智能技术从新生到成长,如果问人工智能的路在何方,我想说,未来可期,路在远方。























