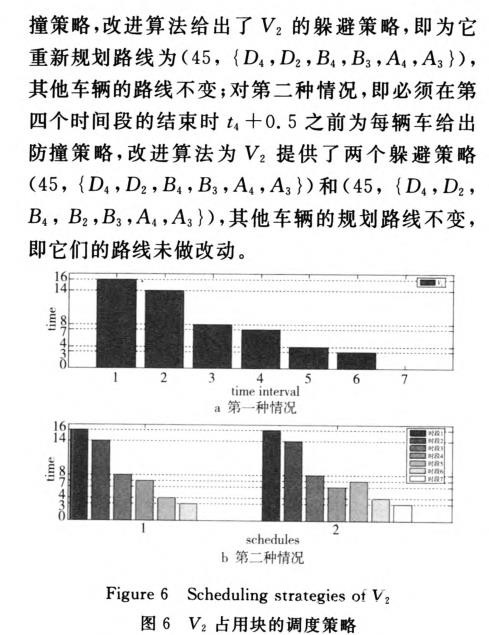
1 引言
随着车辆的增加和道路的建设,交通事故量尤其是在交叉路口发生的事故量在逐年增加。死亡率分析报告系统FARS(Fatality Analysis Reporting System)指出,2009年美国有40.1%的交通事故发生地点为交叉路口[1]。美国公路交通安全管局的一份报告指出,在2010年,44.1%的交叉路口事故发生的原因是由于驾驶员的不当监测和反应[2]。公安部的统计数据显示,2012年全国接报涉及人员伤亡的路口交通事故4.6万起,造成1.1万人死亡5万人受伤,分别比2011年上升17.7%、16.5%和12.3%[3]。
无人驾驶汽车通过改变汽车的基本使用方式,协助预防交通事故,将人们从大量的驾车时间和随时面临的安全威胁中解放出来。无人驾驶汽车大赛(DARPA Grand Challenge)、各大汽车制造商和Goog1e对无人驾驶汽车的发展注入了先进的技术,并使得无人驾驶汽车真正上路的目标逐步变为现实。以Google无人驾驶汽车为例,它于2012年5月获得了美国首个无人驾驶车辆许可证,并将于2015年~2017年进入市场销售。然而无人驾驶汽车同样会碰到如车胎爆裂、油门卡死等突发状况,一个微小的状况也会引起撞车事故。基于此,故障自动保护(也称为自动防撞协议)成为无人驾驶汽车研究的一个重要领域。
无人驾驶汽车依靠先进的感应技术以车对车V2V(Vehicle—to—Vehicle)或车对路口V2I(Vehicle—to—Intersection)的形式进行信息传输和交互,在感应到事故发生后躲避撞击的动作需通过计算机程序进行控制。目前存在的无人驾驶车辆的防撞系统在感应到路口有事故发生后,都给出了未进入路口车辆的躲避策略,但对已在路口内部的车辆的躲避策略研究得比较少。本文以Dreser和Stone的基于V2I的自治路口管理协议AIM(Autonomous Intersection Management)L40为对象,对AIM协议进行改进,以提供防撞机制。
本文结构安排如下:第2节介绍相关工作;第3节对AIM协议进行简单介绍;当路口狭窄或因车辆拥挤空间较小时,强制转弯可能会引发更严重的撞击,针对这种情况,第4节首先给出了这种情况的处理方式,然后对AIM的已有算法进行改进,给出了基于转弯和刹车两种方式的防撞策略;在第5节通过一个实例表明改进后的算法能为车辆提供有效的防撞策略;最后第6节是本文的总结。
2 相关工作
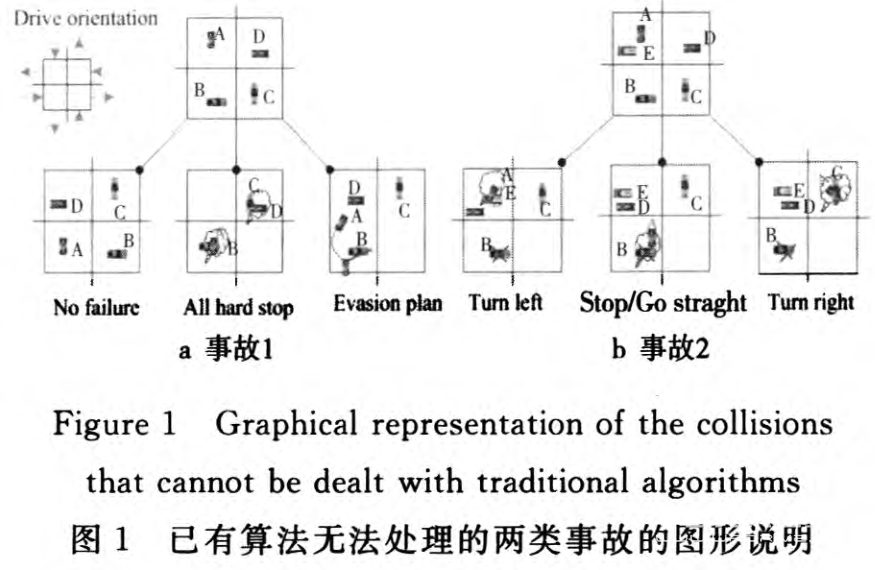
文献[5~8]等从控制的角度,通过计算在路口内部的车辆的最大可控集合给出防撞机制,但它只适用于一辆车进入事故场景的情形,不能为两辆以上的车辆同时给出防撞策略,而且判断车辆是否属于最大可控集合是NP困难的[9]。文献[10]利用无人机模型给出了多辆车的防撞策略,但是当路口车辆较多时,无人机模型的个数呈指数式增长,因此这个方法仅适用于路口车辆较少的情况。文献[11]给出了一个基于时间区间分配策略的算法,它假设每辆车有无限多个防撞策略,当多辆车需同时产生防撞策略时,他们通过一个算法对每个车辆的防撞策略进行组合,以找出最优防撞策略,因此这个算法能处理路口车辆较多的情形。Hafner等人在文献[12]中给出了一个算法,这个算法以刹车和限速两种方式确保车辆没有相撞的可能性。以上的算法在处理下面两类事故(如图1所示)时存在不足,如图1a所示,如果所有车辆没有出现故障,它们会顺利通过路口。但是,当车B突然熄火停靠在路口中央时,若采用a11一hard—stop策略,惯性可能会导致车辆发生碰撞。这种情况下,应采用的策略是,车A向右转向,车C和车D继续按原计划行驶。图1b表示若假设车E在A的右前方,则路口空间不足,此时若车A向右转向会导致车E和车A的碰撞。为避免两者相撞,算法应为A预留空间。
3 AIM协议
本文将对自治路口管理协议AIM进行改进,基于此协议和前面介绍的现有防撞策略的不足之处,本文提出一个改进的AIM协议,并用实验说明该协议提供的防撞策略的有效性。本节将简单介绍AIM协议的主要内容。AIM协议定义的关键词是驾驶员代理DA(Driver Agent,用于控制车辆的程序)和路口管理者IM(Intersection Manager,决定是否接受车辆的预定)。AIM协议的核心是预定方式RM(Reservation Mode)。简单来说,RM的工作步骤为:
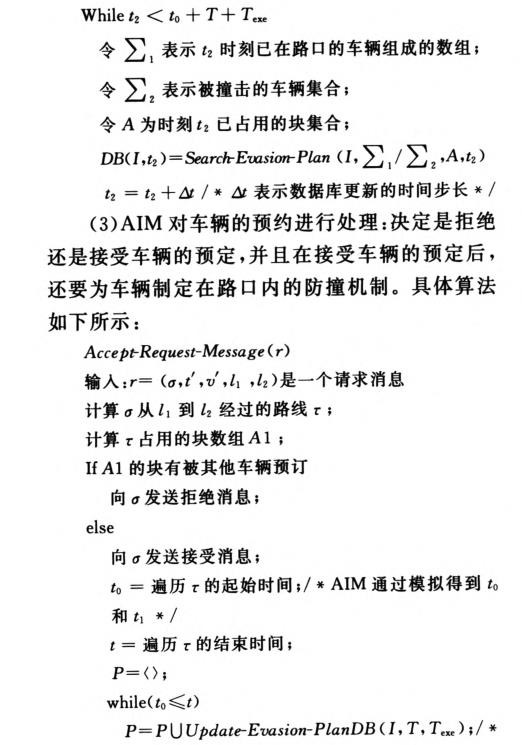
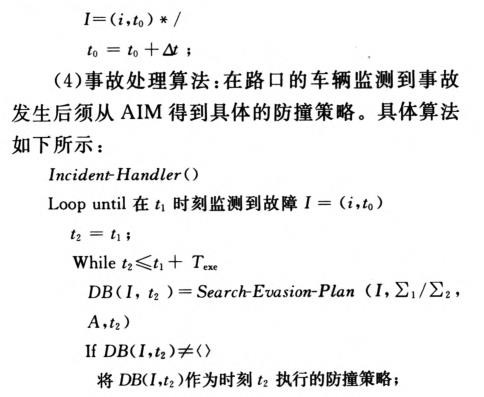
(1)即将驶人路口的车A向IM发出一个内容为预计到达时间、车速(<限制速度)、驶入车道、驶出车道的信息,此信息用来预定路口的块(注:AIM将路口按水平垂直的方式等分为块(Tile),IM根据A发出的预定消息计算A通过路口时经过的块序列(每个时间段都包含一个块序列)。
(2)根据以上信息,IM对A的行为进行模拟,以确定A的预定是否与之前发出预定请求的车辆的路线有冲突(注:IM拒绝A的预定当且仅当在车辆B已经成功预定该块,且根据模拟B使用该块的时间和A是在同一个时间段内)。
(3)如果没有冲突,IM接受A的预定;若IM未接受A的预定,A将重新发送消息,即回到第(1)步,直到IM接受A的预定。A在穿过路口时,每离开一个块,就会向IM发送一个消息,通知该块已经空闲,这样IM将该空闲块纳入其他车辆占用块的计算范围内。
4 基于防撞机制CAP的AIM协议
本节分两种情况对AIM协议进行改进,这两种情况分别是:基于安全距离的刹车防撞机制;依靠刹车和转弯的防撞机制。
4.1基于安全距离的刹车防撞机制
首先考虑一种简单情况,即仅靠刹车防撞。这种方式虽然简单,但在特殊情况下,比如在路口极其狭窄,或路口车辆密度很大时,它是必须的,因为此时转弯可能会造成多辆邻近车辆的相撞。
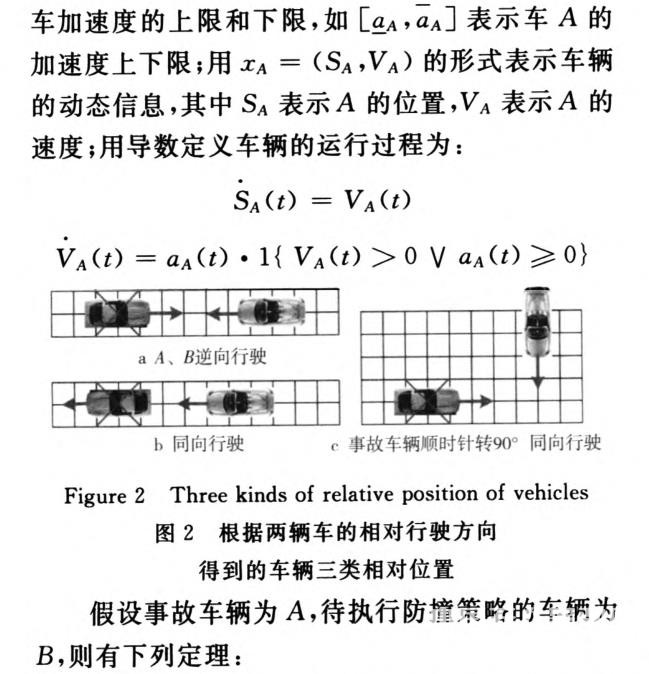
下面按照车辆的相对位置对这种策略进行分类讨论,图2表示了根据两辆车的相对行驶方向得到的车辆的三类相对位置。另外,用区间表示每辆车加速度的上限和下限,如

定理4的证明比较简单,故本文省略。定理1~定理3在现有AIM协议[4]中是无法实现的,因为在RM中没有将汽车的安全距离考虑在内。根据以上定理,本文对AIM所做的改进为:根据块占用的前后顺序,为所有块计算相邻车辆的安全距离,在车辆穿过路口时,AIM通过感应技术计算相邻车辆的安全距离,若小于安全距离,则提示车辆减速。以上改进是合理的,因为我们规定了它的执行条件,即路口宽度小于4m且为同向单车道路口。这种保守的策略保证了无人驾驶车辆的安全性。
4.2依靠刹车和转弯的防撞机制
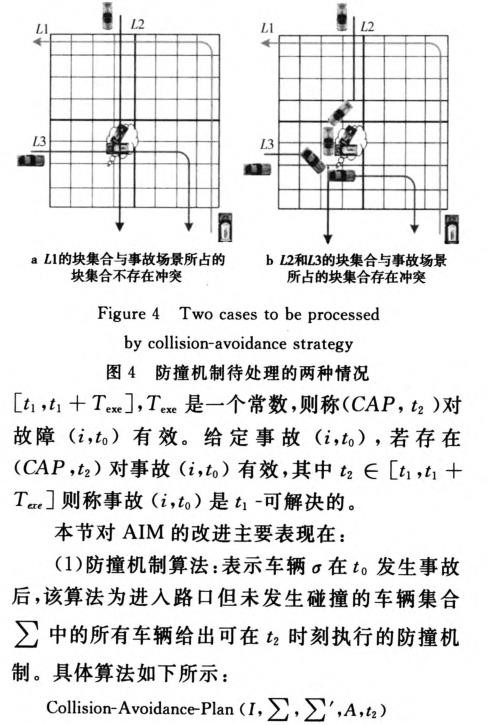
当路口宽度大于4 m或为同向多车道路口时,防撞机制不仅可使用依赖安全距离的刹车方式,而且还可以选择更高效的依靠刹车和转弯的防撞机制。通过一组算法说明本文对AIM调度策略的改进。首先对车辆的动作进行描述。用微分描述车辆的动作:
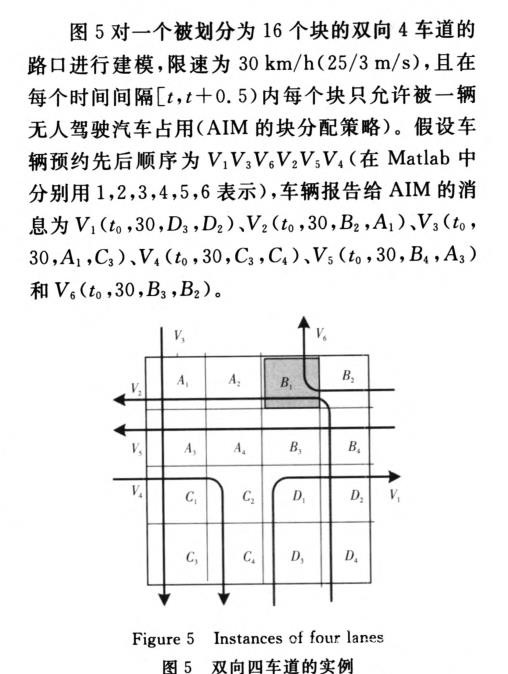
5 实例
6 结束语
目前存在的无人驾驶车辆的防撞系统在感应到路口有事故发生后,都给出了未进入路口车辆的躲避策略,但对已在路口内部的车辆的躲避策略的研究比较少。自治路口管理协议AIM的防撞机制也不能有效地为路口内部的车辆给出躲避策略。本文设计的算法根据事故发生的时间、监测到故障的时间和给出防撞策略的时间为路口每个车辆单独设计防撞策略,与传统的计算最大防撞集合的做法相比,不会因为算法的不同造成策略遗漏。
本文待改进的地方是须通过实验找到合理的时间步和Texe算法的有效性取决于时间的更新步长和Texe,步长越小给出的策略越完善,但这却拉长了从监测到故障到给出防撞策略的时间即Texe如何找到合理的时间步和Texe。是待解决的问题。
参考文献:
[1] Traffic Accident causation inEurope(TRAcE)FP6—2004一IST一4. Deliverable 1.3 road users and accident causation[EB/0L].[2009一07—21].http://halshs.archives—ouvertes.fr/hal一00545396/.
[2] USA National Highway Traffic Administration(NHTSA).Traffic safety Facts[EB/0L].[2009一08—13].http://www.nrd.nhtsa.dot.gov/Pubs/81 1402EE.pdf.
[3] Tranbbs.com. The nationaI traffic accident statistics[EB/0L].[2012—12—15].http://www.tranbbs.com/Techarticle/TInformation/TechArticle-111913.shtml.(in Chinese)
[4] Dresner K M,stone P.A multiagent approach to autonomous intersection management[J]. Journal of Artificial Intelligence Research,2008,31(3):591—656.
[5] Desaraju V,Ro H,Yang M,et a1.Partial order techniquesfor vehicIe collision avoidance:Application to an autonomous roundabout test_bed[c]∥Proc of IcRA’09,2009:82—87.
[6] Duperret J,Hafner M R,Vecchio D D.Formal design of a provably safe robotic mundabout system[c]∥Proc of IRos’10,Z010:2006—2011.
[7] Hafner M R,Vecchio D D.Computationaltools for the safety control of a class of piecewise continuous systems with imperfect information on a partial order[J].sIAM Journal of Contr01 and 0ptimization,2011,49(6):2463—2493.
[8] Lygeros J,Tomlin c,Sastry S.contr01lers for reachability specifications for hybrid systems[J].Automatica,1999,35(3):349—370.
[9] CoIombo A,Vecchio D D.Efficient algorithms for collision avoidance atintersections[c]//Proc ofHscc’12,2012;145—154.
[10] C010mbo A,Vecchio D D.supervisory control of differentiaIly flat systems based on abstraction[C]//Proc of cDc—ECE’11。2011:6134—6139.
[11] Kowshik H,caveney D,Kumar P R.ProvabIe systemwide safety in inteIligent intersections[J].IEEE Transactions on Vehicular Technology,2011,60(3):804—818.
[12] Hafner M R,cunningham D,caminiti L,et a1.Automated vehicl}to_vehicle coIlision avoidance at intersections[c] //Proc of WCITS,11,201l:1.