在5月17日举行的2020搜狐科技5G峰会上,中智行技术副总裁张振林在会上做了演讲,并接受了记者的专访,分享了5G为自动驾驶带来的动力和机遇。

自动驾驶技术出现至今已近十年,总体来讲,经历了几段波动式成长的阶段。而张振林认为,5G正是中国换道超车的好时机,“5G的辅助,可以让自动驾驶在很短的时间内达到一个量级的提升。”
在2018年,自动驾驶前十年的技术发展达到Gartner曲线的第一个峰值,经过了高速成长并走向成熟的阶段。从技术层面来看,激光雷达、毫米波雷达等传感器技术及深度学习、软件算法逐渐成熟,为针对不同场景的主机厂及科技公司提供了不断迭代的技术支持。
但当下多数自动驾驶成果的落地依旧集中在B端市场。“我觉得当前阶段或者在接下来的3至5年,甚至更长时间之内,它(自动驾驶)可能还是一个B端市场逐渐去拓展范围再扩大的阶段。”张振林表示。
而针对近期L3及L4的争议,张振林从一开始就认准突破L4级自动驾驶,认为L3不是一个比较可行的方案。
这种技术研发的“越级”现象也与落地场景有关。 L4、L5的目的更多是为了园区的‘全无人’,在货运、码头、封闭园区等场地更有应用场景,而交出给用户的乘用车则使用场景和时间不受车企控制。”
由于场景及时间的不确定性,增加了技术适应各种场景的难度,所以真正的乘用车“全无人”自动驾驶需要漫长的技术研发过程去实现。
专访实录如下:
记者:自动驾驶经过一段爆发期后,当下行业和资本都进入了冷静期,您认为5G会掀起下一个高点吗?为什么?
张振林:自动驾驶这个概念,以Google下面的Waymo为代表的自动驾驶公司,从2012年开始就在做相关的尝试,它其实经历了几个阶段。但是中国在自动驾驶方面,比美国稍微晚了几年。这几年的时间,对于我们来讲,收集数据,大量的人工智能的训练,这一块要追赶可能需要花很长时间还追赶不上。我们的机会在哪里?去年参加5G峰会的时候,我在会上就说5G有可能是我们中国换道超车的一个机会,它可能会让我们的自动驾驶相对于国外来讲来得更快,可能会更加安全。
记者:为什么?5G能解决什么问题?
张振林:很多的车是单车智能,在车上加装了很多传感器,不断地收集数据,让车上的计算平台不断地计算,然后再来规划路径。你可以把车看作一个小孩,你给他看的东西越多,他就越聪明。但是小孩培养要从0岁到十几岁,要花很长很长时间。
对于我们来讲,除了靠小孩自身的智力之外,5G可能就是我们另外一个工具。他不仅仅靠自己的努力去识别、去感知,我们还可以通过5G的技术,在路边、在云端帮助他来识别,并且把识别的结果发给他,两者相融合起来,可以让车在很短的时间内达到一个量级的提升。这是5G能给自动驾驶带来的巨大帮助和推动。
记者:自动驾驶的应用场景其实分B端和C端,就这两者相比,B端应用场景已经相对成熟一些了。您觉得C端的应用场景离大规模的应用还有多远?还需要做些什么?
张振林:这是一个很好的问题。不管是像我们做自动驾驶的智慧出行公司,还是很多车企,大家都在提自动驾驶,但大家所看中的自动驾驶的方向,确实有的是to B的,有的是to C的。
我个人的观点可能会比较直接一点,我觉得当前阶段或者在接下来的3—5年,甚至更长时间之内,它可能还是一个B端市场逐渐去拓展范围再扩大的阶段,C端市场对于车和路的依赖非常大,对于C端使用场景还有一定的不可控性。所以,to C的场景还需要很长的一段时间,to B相对来说比较成熟和普及了,to C才会真正开始大规模应用。
记者:中智行为什么从一开始就选择做L4,是觉得L3比较鸡肋吗?
张振林:最近有很多业内人士,甚至民众也对L3、L4产生了怀疑,特别是L3。有的车企已经提出对L3落地了,但最近也宣布放弃了。
我2016年开始做自动驾驶相关的工作,2017年正式做L4级的自动驾驶。当时其实就是看到在L3这一块,我个人认为L3它相对来讲不是一个非常值得看好的,或者说不是一个比较可行的方案。
虽然ACE对自动驾驶的分类是L1、L2一直到L5,中国的自动驾驶也是这样一级一级往上分的,但实际上并不是L3加一点就变成了L4,或者L2加一点就变成了L3。
L3跟L4按照目前划分的方法来看,最大的区别是在一个L3车子上,你作为一个乘客或者你坐在驾驶席上,在系统不能够控制的情况下,你要随时做好接管的准备。这就意味着这个乘客必须具备驾驶技能,简单来说它要有驾照,L4是没有这样一套期望的。整个系统在设计的时候并不考虑系统如果不能够应对,还有一个人能接管。
这里面还有一系列的挑战,需要开发驾驶员的监测系统,具不具备接管的能力,在我看来整个系统的复杂度和可靠性有很多缺陷。所以,我们说L4的时候从来不考虑怎么观察车内的乘客,而是尽可能地做好系统控制的能力。在系统出现失效的情况下,我们怎么将系统进行最小系统化,让车可以慢下来到最终停下来靠边。我们可能会通过像5G的技术,可能会通过远程的控制和接管,让车能够应对一些突发场景。所以,大家可能逐渐意识到了这样的问题。
记者:了解到中智行并没有与国内三大地图厂商进行合作,而是自己采集并制作地图,为什么?数据收集方面的难度如何克服?
张振林:您指出了非常关键的一点。中智行不排斥跟任何的地图商进行合作。在当前的阶段,我们更多的是在一个比较小的范围内通过自己的技术进行采集,将来肯定也是会跟地图商进行大规模的普及和扩展,但是当前中智行的技术可以说还是比较强悍的。
我们用的地图跟现在绝大部分图商做的,不管是2D地图,还是3D高精度地图相比,我们在信息的丰富程度,和精度上,都要更好。
比如地图定位,现在你打开手机也有地图,您可能大概知道您在哪一条路上,但是你根本不知道你在这条路上的哪一条车道上,你不知道你的车有没有压线或者碰到马路牙子。这种精度对于自动驾驶来讲是完全不够的,我们动态的精度能达到5厘米左右。结合我们的高精地图,可以实现非常精准的定位。这可能不是图商目前的研发重点,中智行在这一点上还是非常领先的。
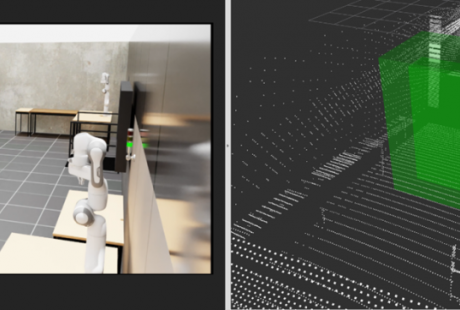
背后有一系列的软件和硬件在支撑。比如在车上我们有高精度的激光雷达,我们有摄像头,还有高精度插分的GPS和导航系统。结合我们事先采集的高精度地图,再结合我们用激光进行定位,所以我们可以实现很多公司很难去达到的这么高的精度。
记者:5G会不会对这一部分又有很大的促进作用?
张振林:是的,这也是我们特别看好5G的原因。5G通常大家会比较关注的几个点在于它的低时延、高带宽、广连接这样一些特性。5G它的基站数目会比4G时代多很多,我们也可以用5G进行辅助定位。通过5G的基站,跟我们的插分GPS、激光雷达结合,我们可以把5厘米的精度再缩减到3厘米、2厘米,甚至更低,或者我们把车上传感器的精度也可以提高。这里面有很多想象的空间和技术上可尝试的路径。