2020年6月22日-23日,“2020第三届全球自动驾驶论坛”隆重召开。本次论坛重点围绕与自动驾驶规模化商用有关的核心技术、法律法规、技术评测、商业模式等话题展开探讨,下面是西门子工业软件自动驾驶产品线大中华区总监黄汉知在本次论坛上的发言:

西门子工业软件自动驾驶产品线大中华区总监 黄汉知
前面两位嘉宾的演讲都非常精彩,其中PTV公司沈畅总经理的演讲让我沉浸其中,不禁想到在十年、二十年之后,如果路上无人驾驶汽车的普及率达到50%,无人驾驶汽车跟人类驾驶员怎么互动,智能交通怎么应对这种情况?也许十年、二十年之后,我们可以再次跟智能交通领域的专家沈畅女士相聚讨论这个话题。
回到现实当中,目前自动驾驶汽车本身还面临非常多的技术挑战,就像丰田汽车CEO所说,如果要完全测试自动驾驶汽车,可能需要88亿英里甚至更多的路试,对于成本很敏感的汽车公司来讲显然不现实。
这里就有一个悖论,明明知道不可能去遍历所有的交通场景工况,究竟要做多少测试才能认为自动驾驶汽车系统可以上路,放心交付给消费者呢?
西门子工业软件认为,要解决这个挑战和困难,必须要采用基于模型的方法,也就是正向的基于模型的自动驾驶开发和测试的方法论和工具链。这个工具链的核心就是在产品开发早期尽可能多的用仿真手段,尽可能早的暴露系统、算法、参数存在的问题,而不是等到产品原型,甚至车辆的原型、量产车上市之后,再通过物理路试去暴露问题,相信这对于任何一个汽车公司来说都是不能承受的风险。所以我们必须在早期采用纯模型的仿真,然后是硬件在环和车辆在环测试手段,再进入到封闭的试验场地,公共道路,最后通过法规测试和认证。
自动驾驶系统要采用这种基于模型的方法必须要有一个很好的数字孪生模型,自动驾驶的系统从技术上可以分成四个部分,场景的工况、所采用的环境感知传感器、控制规划决策算法,最后离不开底盘纵向和横向的动力学模型。西门子工业软件Simcenter Prescan,及一系列数字化建模工具Simcenter Amesim, Simcenter HEEDS, Simcenter 3D, 可以充分支持自动驾驶的数字孪生仿真工具,进行系统级别、车辆级别的自动驾驶系统建模,提供自动驾驶新能源车的整体开发测试解决方案。
数字孪生模型长什么样子?
如视频所示,是AVP自动代客泊车系统的数字孪生,包括停车场场景,所采用的鱼眼、超声波、传感器感知特性,AVP算法、底盘执行机构,在视频当中都有所体现。仿真是一个很好的工程方法和思路,但是,仿真工具如何发挥价值?怎么应用?是每个人都很关心的问题。
我们认为这个数字孪生系统有一系列的关键技术和挑战,场景渲染要真实,场景内容要丰富,传感器模型要精确,还要支持业界所用的各种算法平台,动力学模型要有足够的精度,还要满足不同客户不同的应用模式。今天的演讲,想围绕这个关键技术图展开,论述自动驾驶数字孪生的关键技术和主要应用模式,将通过一系列技术细节和客户案例来论述。
挑战1,场景工况。Prescan采用的是游戏级引擎来渲染,所以视觉效果非常逼真和绚丽,比如视频所示城镇无人驾驶系统在Prescan里的呈现。除了渲染质量之外,也要有很好的测试内容,测试内容、场景工况来源有多种,除了软件自带的图形化界面建模方法,也开放API支持外部的程序参数化建模,当然也支持自动化测试的方法,把一个典型的工况泛化成不同的case,支持高精度、低精度地图数据的导入。全球法规工况已经在我们模型里,道路交通事故的数据也是非常宝贵的测试数据来源,我们也会支持正在成熟的OpenScenario场景格式,跟国内外活跃的场景数据提供商的格式也有多种对接。我们有很好的数据生态。
有了很好的渲染,也有了很好的生态,怎么用?用途有很多,就举一个例子:对于深度学习而言,除了有一个很长的拖尾效应,就是算法训练精度达到99%之后,再怎么往上提高?面临一系列的挑战,大家都非常清楚,训练样本要大,但样本采集只能涵盖日常交通工况,数据采回来要标注,标注完之后,希望测试更多典型、有覆盖度的工况。这里就有一个思路,如果用仿真的合成数据,是否能够解决这些问题呢?所以我们就跟德国DFKI人工智能研究中心做了一个研究项目,项目概况是讨论这两个问题,如果纯粹用合成数据来训练算法是什么结果,如果用一小部分合成数据+大部分路采数据训练算法是什么结果?我们采用CNN算法进行训练。
项目图概况,右边是路采数据,中间可以用仿真重现这些数据,也可以加入路上采不到的,比如最近非常知名的特斯拉汽车在台湾发生的事故,一个长的大卡车倒在路上,采不到这种类型数据,是否可以用仿真重现出来。
最后得出结论供大家参考,显然,纯粹用合成数据训练出的算法结果肯定不好,如果有选择的选一些合成数据加入到训练样本当中,能够提高算法精度。一句话,渲染很逼真,只是对我们肉眼的效果,深度学习的算法认不认,还要通过这种项目来确认。
案例2,精确的环境感知传感器模型。
我们以几类典型的感知传感器为例。
前视摄像头,作为模型而言,有三个层次,首先是基础的内外参模型;二是成像效应,尤其是Distortion畸变的模型;三是从镜头、快门、色彩滤波阵列、CMOS芯片特性、AD转换噪声等等,都要建一系列模型。
毫米波雷达,同样有多个不同的层次,大多数客户会用到基础的模型,也就是range/rnage rate/angled的分辨率和精度模型,有些做算法的除了要这些信息之外,还要不同物体反射回来的能量,我们也可以支持。
第二种,雷达的漏检测、误检测、目标分列、延迟等典型特性。
第三种,可以对雷达本体的射频收发、信号处理、目标聚类等信号流的所有环节进行建模。包括:MIMO多入多出天线的配置和天线增益图谱,包括后面AD转换和FFT傅里叶变换的采样方法等,FMCW调制解调波形的设置,相位噪声和热噪声,这样就可以仿真多点反射、多径反射等等特性,这样,就可以支持射频天线设计、信号处理方法和参数调优、目标聚类和追踪算法开发优化,基于原始数据的数据融合,等等。
基于物理模型的输出有两种形式:AD转换之后,FFT变换之前的原始数据输出;以及距离-多普勒-能量图谱,可以从这里开始做后面目标的提取、分类,包括支持数据的融合。
上图形象展示了雷达从射频天线到数据层,再到目标层的数据流。西门子有全套工具能够支持所有的数据流仿真, Simcenter 3D可以对高频天线部分进行仿真,P热scan可以对数据处理和目标提取部分进行仿真。
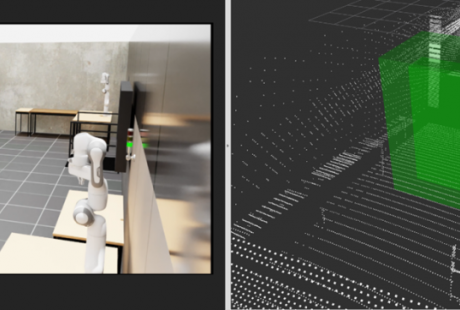
激光雷达模型提供多种层次。不管是摄像头、雷达、还是激光雷达,业界做仿真大部分都停留在第一个层次,对激光雷达也是这样,很多工具能提供point cloud,但只是提取环境中目标的轮廓,这是真值。真正要对激光雷达进行建模,就是Beam divergence、Beam dimension、Scan pattern等等,能够仿真多点反射、多径反射、环境折射和衰减、车辆速度导致的时间效应带来的点云畸变,等等。
在V2X领域,我们也提供多个类型的模型,首先不同地区,中国、北美、欧洲有法规的地区数据层的基本信号输出,第二十有效通行距离,第三,V2X在不同场景下,如城市十字路口高楼大厦林立,在高速上速度等等场景,都会对传输的丢包率有显著影响,所以我们也有相关丢包率的模型仿真。
传感器类型非常多,不一一列举。仿真是高效率工具。我们客户如何应用?
日本Denso做前视摄像头参数配置选择时,使用了Prescan仿真方法,从上百套参数中选取最优,这显然是路试难以做到的
一汽集团做国内第一个ACC量产项目时,用了一个很有益的思路,把毫米波雷达在实验室进行测试,通过测试结果拟合出对于分辨率和精度的模型放到仿真工具当中,支持它后续的ACC/AEB的算法工具开发,这是非常有益的思路。
国内创新型公司,如苏州豪米波雷达,通过大量调研发现Prescan确实是全球最领先的毫米波雷达模型提供者。
第三个核心技术,数字孪生还要支持多种不同的算法语言环境,如图非常详细地列出了对不同环境的支持,有Windows版,有Linux版,有RT版,同时还支持HPC/cloud,代码黄静也支持C++/Simulink,并借此可以支持C/Paython/ROS/Apollo/Auto ware等。
在HiL领域,我们提供各种类型的HiL:摄像头投影式,摄像头注入式,雷达回波模拟式,雷达数据注入式,车辆在环ViL,VX的HiL,等等,不一一列举,都是我们的常规应用。有一个大家比较感兴趣的是,目前自动驾驶所追求的云计算,因为可以高并发、短时间内支持大量工况的仿真结果输出。这里可以利用西门子的一系列工具,因为可能要测试10万、100万个案例时,最好有一个测试自动化和探索工具来驱动,西门子也有HEEDS这种测试和管理工具来驱动Prescan云计算。
这是我们在微软Azure部署Prescan的一个视频示意图,就是多个测试case管理的界面,如有1000个case,想在5分钟之内跑完,要监控每个case运行状态,运行之后是成功还是失败,最后有上千个计算结果要进行分析。如红色代表这个系统是失效的,当一个自动驾驶车辆遇到路边突然有一个cut in静止目标时,不能有效避让,就是红色部分,绿色部分是成功的通过系统和参数的调优避免这次事故,当然也有其他状态,不一一列举不同颜色所代表的不同含义。
应用方式有多种,不同客户应用不一样,接下来叶总监也会讲MaxiEye的视觉算法能力。MaxiEye也使用Prescan进行基于单目视觉的高精度地图众筹采集的算法开发,如果要通过路采数据来训练算法,因为没有交通元素的真值,无法开展。仿真可以提供虚拟交通和真值,用来训练算法,根据周博士的反馈,两周之内就把这个算法做好了。
传统企业更多用HiL方式,比如本田用我们硬件在环台架,我们也交付很多套。德系企业戴姆勒用商用车的ADAS研究时,也夸赞了我们精确的传感器模型和丰富场景的数据模型。
第四个核心技术,要有准确的动力学模型,刚才讨论过一系列动力学的工具,提到的大多数工具是在底盘的外特性模型领域。举一个例子,如果在雨天,路面附着系数低,导致ABS介入,限制了后轮的制动力矩,必然对制动距离造成影响,这个特性是大多数做外特性动力学工具不能仿真、模拟、分析的,西门子另外一个工具就是电气液作动系统领域最详细的建模工具Amesim,这种动力学特性对它来说是小菜一碟。
一个日系商用车企做高速公路自动驾驶辅助项目研究时,也对转向、制动、发动机、变速箱所有模型进行了详细建模,配合Prescan来开发它的高速公路驾驶辅助系统。
西门子是一家巨大的公司,西门子工业软件也有非常全面的产品组合,跟大家做一个介绍。西门子工业软件产品门类有几大类:智能制造、物联网、产品设计和分析三个领域的数字孪生,推动中国企业的数字化转型。在产品设计和分析领域,我们的数字孪生涵盖电、气、液、声、光、电、热、材料等各个物理领域。在结构设计分析、CFD流体、热管理、能量流、燃油经济性、安全性、NVH、驾驶性等所以汽车行业已知的性能设计领域,都有对应的数字孪生手段和仿真工具。今天我们介绍的新能源智能网联汽车整体解决方案,只涉及到我们已小部分业务,就是今天讲到的在自动驾驶工具链。
西门子工业软件在仿真领域是百年老店,经验丰富,但是基于模型的方法价值巨大。但是,要记住一句话,就像英国数学家和统计学家George Box所说的:没有完美的模型,但是有些模型很有用。为什么讲这句话呢?我跟很多业界同仁交流仿真时,发现他们都会给我举一些IT企业的例子,我在仿真当中跑了多少虚拟的里程,当然这是仿真的一个应用方面,但不是仿真的全貌,所以我不完全赞同。我不认为仿真是一个一定要跑多少亿英里的平台,更多是跑多少类不同的测试场景工况的平台,要集中研究仿真所擅长的应用模式。如图,怎么样有机结合物理测试和仿真工具,相信这里列出的路试优点和缺点,仿真的优点和缺点,都能得到大家的认同,不一一列举。
“工欲善其事,必先利其器“,西门子工业软件提供强大的数字孪生工具链和方法论,支持自动驾驶业界不断打磨技术,让我们一起共同期待自动驾驶时代的来临,谢谢大家!